

Estimating the sources of motor errors for adaptation and generalization
- PMID: 19011624
- PMCID: PMC2707921
- DOI: 10.1038/nn.2229
Estimating the sources of motor errors for adaptation and generalization
Abstract
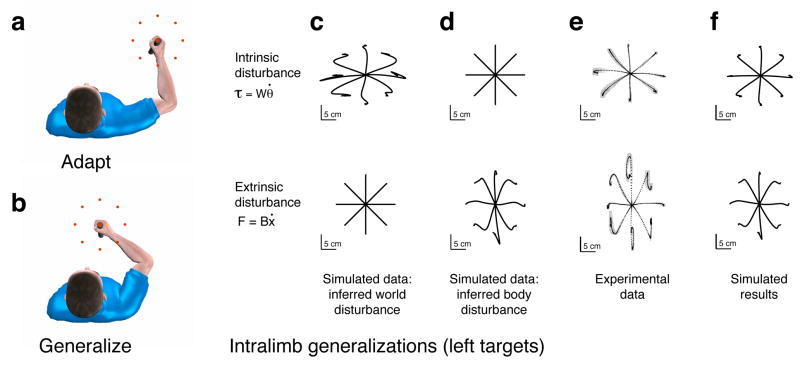
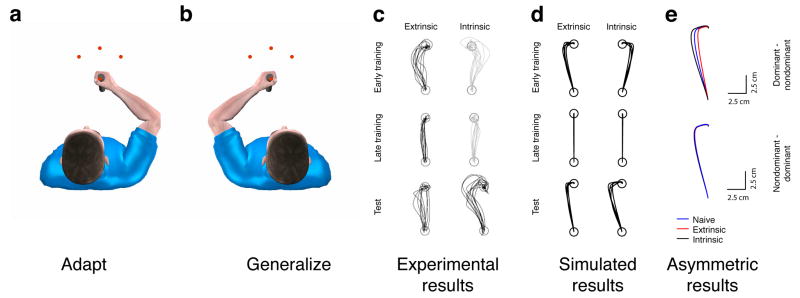
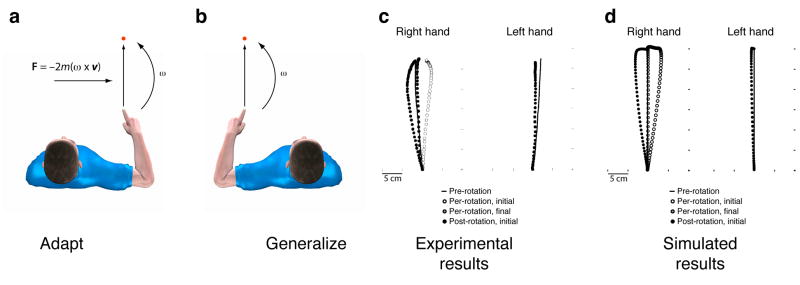
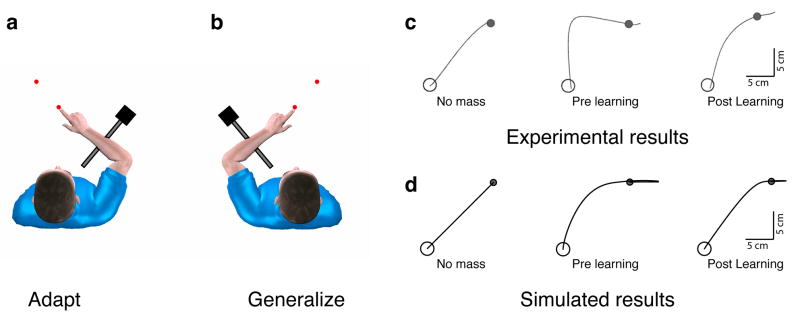
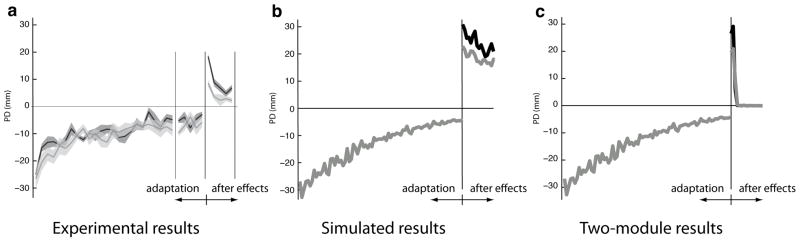
Motor adaptation is usually defined as the process by which our nervous system produces accurate movements while the properties of our bodies and our environment continuously change. Many experimental and theoretical studies have characterized this process by assuming that the nervous system uses internal models to compensate for motor errors. Here we extend these approaches and construct a probabilistic model that not only compensates for motor errors but estimates the sources of these errors. These estimates dictate how the nervous system should generalize. For example, estimated changes of limb properties will affect movements across the workspace but not movements with the other limb. We provide evidence that many movement-generalization phenomena emerge from a strategy by which the nervous system estimates the sources of our motor errors.
Figures
References
-
- Conditt MA, Gandolfo F, Mussa-Ivaldi FA. The motor system does not learn the dynamics of the arm by rote memorization of past experience. J Neurophysiol. 1997;78(1):554–60. - PubMed
-
- Cothros N, Wong JD, Gribble PL. Are there distinct neural representations of object and limb dynamics? Exp Brain Res. 2006;173(4):689–97. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
