

Relevance of error: what drives motor adaptation?
- PMID: 19019979
- PMCID: PMC2657056
- DOI: 10.1152/jn.90545.2008
Relevance of error: what drives motor adaptation?
Abstract
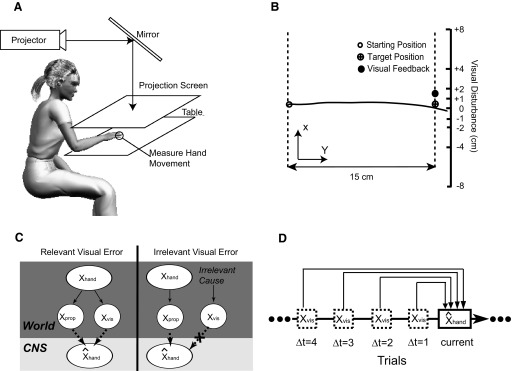
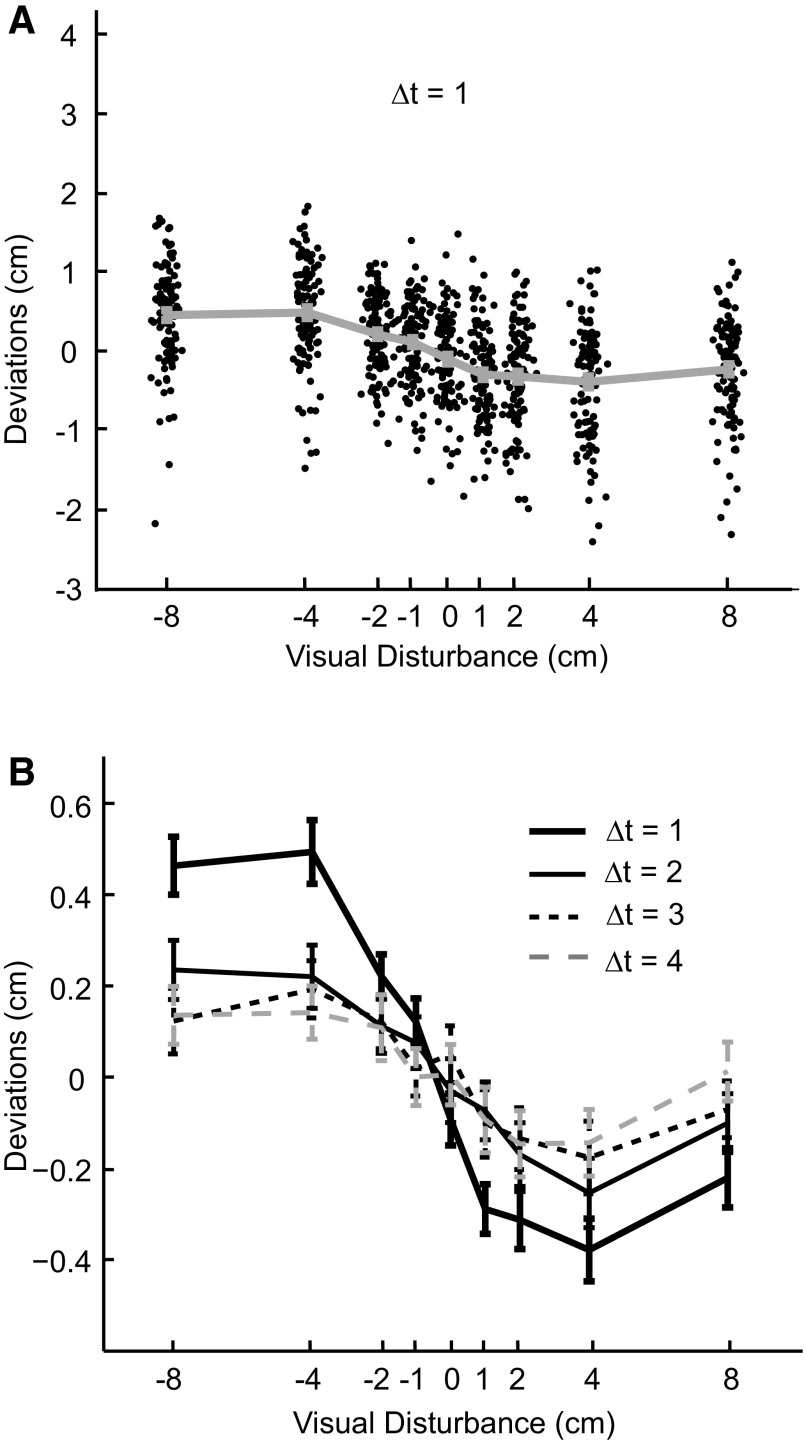
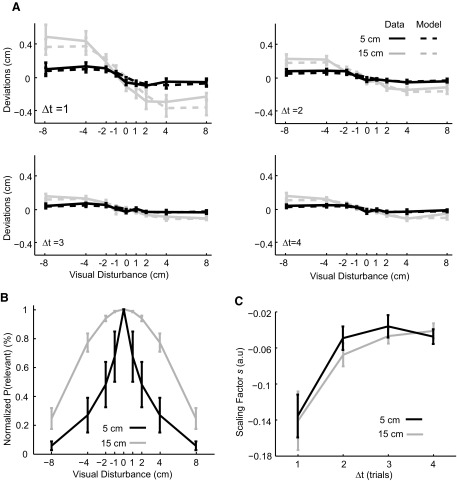
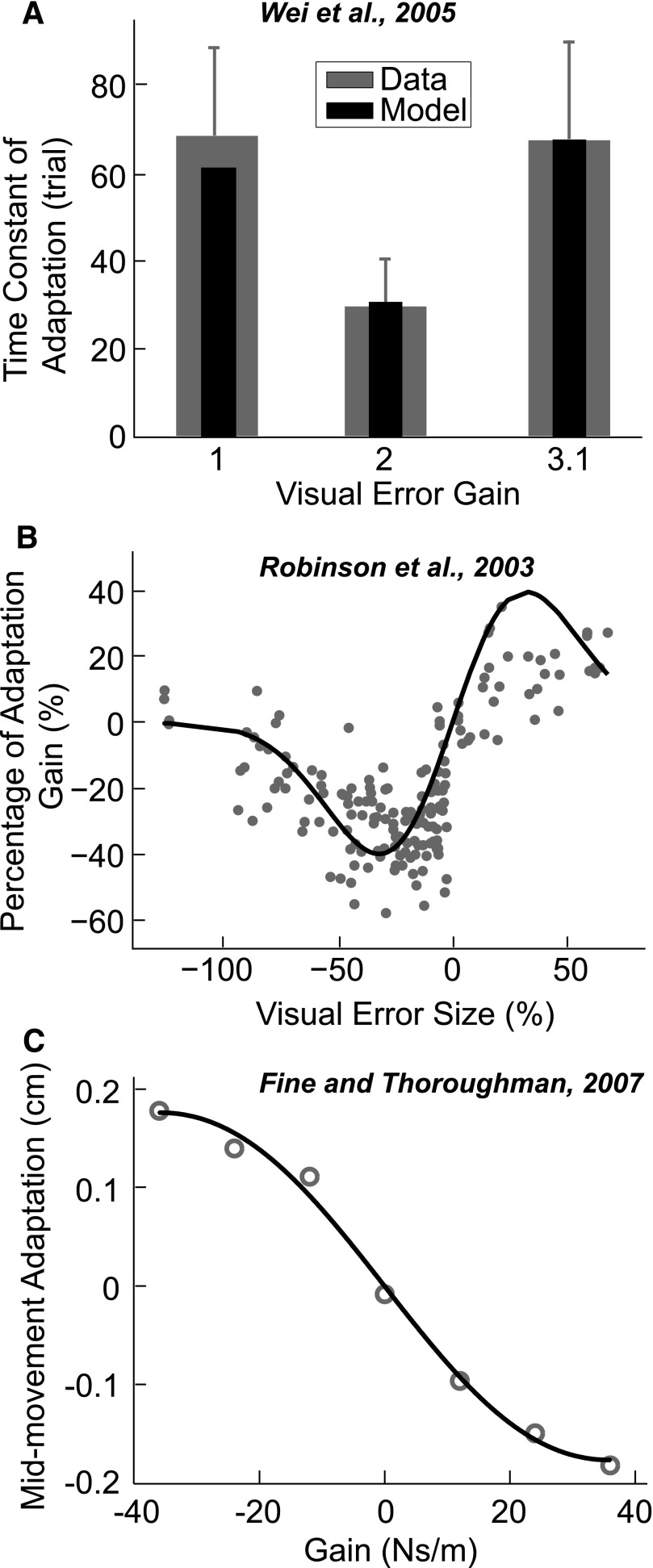
During motor adaptation the nervous system constantly uses error information to improve future movements. Today's mainstream models simply assume that the nervous system adapts linearly and proportionally to errors. However, not all movement errors are relevant to our own action. The environment may transiently disturb the movement production-for example, a gust of wind blows the tennis ball away from its intended trajectory. Apparently the nervous system should not adapt its motor plan in the subsequent tennis strokes based on this irrelevant movement error. We hypothesize that the nervous system estimates the relevance of each observed error and adapts strongly only to relevant errors. Here we present a Bayesian treatment of this problem. The model calculates how likely an error is relevant to the motor plant and derives an ideal adaptation strategy that leads to the most precise movements. This model predicts that adaptation should be a nonlinear function of the size of an error. In reaching experiments we found strong evidence for the predicted nonlinear strategy. The model also explains published data on saccadic gain adaptation, adaptation to visuomotor rotations, and force perturbations. Our study suggests that the nervous system constantly and effortlessly estimates the relevance of observed movement errors for successful motor adaptation.
Figures

References
-
- Bock O Load compensation in human goal-directed arm movement. Behav Brain Res 41: 167–177, 1990. - PubMed
-
- Bock O Adaptation of aimed arm movements to sensorimotor discordance: evidence for direction-independent gain control. Behav Brain Res 51: 41–50, 1992. - PubMed
-
- Burgar CG, Lum PS, Shor PC, Machiel Van der Loos HF. Development of robots for rehabilitation therapy: the Palo Alto VA/Stanford experience. J Rehabil Res Dev 37: 663–673, 2000. - PubMed
-
- Burnham KP, Anderson DR. Model Selection and Multimodel Inference: A Practical-Theoretic Approach. New York: Springer, 2002.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources