

Functional network reorganization during learning in a brain-computer interface paradigm
- PMID: 19047633
- PMCID: PMC2614787
- DOI: 10.1073/pnas.0808113105
Functional network reorganization during learning in a brain-computer interface paradigm
Abstract
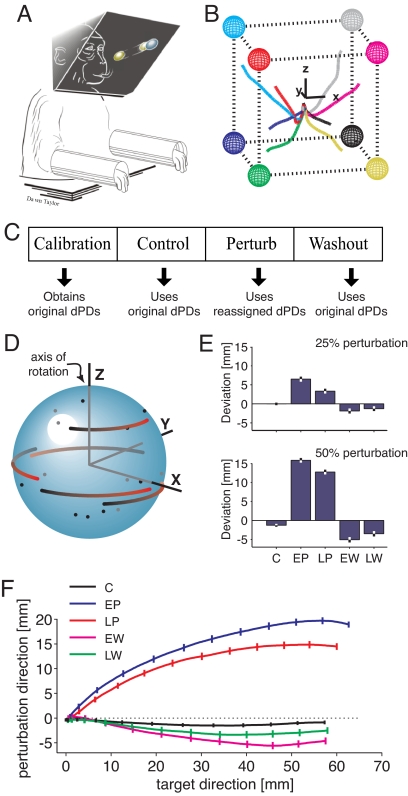
Efforts to study the neural correlates of learning are hampered by the size of the network in which learning occurs. To understand the importance of learning-related changes in a network of neurons, it is necessary to understand how the network acts as a whole to generate behavior. Here we introduce a paradigm in which the output of a cortical network can be perturbed directly and the neural basis of the compensatory changes studied in detail. Using a brain-computer interface, dozens of simultaneously recorded neurons in the motor cortex of awake, behaving monkeys are used to control the movement of a cursor in a three-dimensional virtual-reality environment. This device creates a precise, well-defined mapping between the firing of the recorded neurons and an expressed behavior (cursor movement). In a series of experiments, we force the animal to relearn the association between neural firing and cursor movement in a subset of neurons and assess how the network changes to compensate. We find that changes in neural activity reflect not only an alteration of behavioral strategy but also the relative contributions of individual neurons to the population error signal.
Conflict of interest statement
The authors declare no conflict of interest.
Figures




References
-
- Buonomano DV, Merzenich MM. Cortical plasticity: from synapses to maps. Annu Rev Neurosci. 1998;21:149–186. - PubMed
-
- Sanes JN, Donoghue JP. Plasticity and primary motor cortex. Annu Rev Neurosci. 2000;23:393–415. - PubMed
-
- Paz R, Wise SP, Vaadia E. Viewing and doing: similar cortical mechanisms for perceptual and motor learning. Trends Neurosci. 2004;27:496–503. - PubMed
-
- Siegelbaum SA, Kandel ER. Learning-related synaptic plasticity: LTP and LTD. Curr Opin Neurobiol. 1991;1:113–120. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
