

Haptic feedback in robot-assisted minimally invasive surgery
- PMID: 19057225
- PMCID: PMC2701448
- DOI: 10.1097/MOU.0b013e32831a478c
Haptic feedback in robot-assisted minimally invasive surgery
Abstract
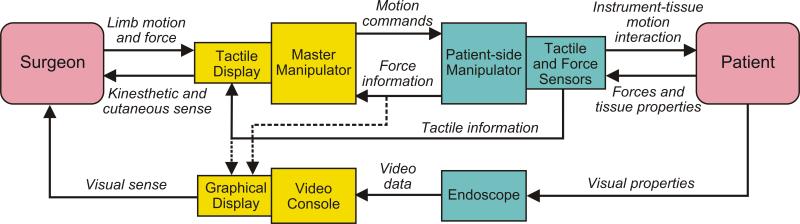
Purpose of review: Robot-assisted minimally invasive surgery (RMIS) holds great promise for improving the accuracy and dexterity of a surgeon and minimizing trauma to the patient. However, widespread clinical success with RMIS has been marginal. It is hypothesized that the lack of haptic (force and tactile) feedback presented to the surgeon is a limiting factor. This review explains the technical challenges of creating haptic feedback for robot-assisted surgery and provides recent results that evaluate the effectiveness of haptic feedback in mock surgical tasks.
Recent findings: Haptic feedback systems for RMIS are still under development and evaluation. Most provide only force feedback, with limited fidelity. The major challenge at this time is sensing forces applied to the patient. A few tactile feedback systems for RMIS have been created, but their practicality for clinical implementation needs to be shown. It is particularly difficult to sense and display spatially distributed tactile information. The cost-benefit ratio for haptic feedback in RMIS has not been established.
Summary: The designs of existing commercial RMIS systems are not conducive for force feedback, and creative solutions are needed to create compelling tactile feedback systems. Surgeons, engineers, and neuroscientists should work together to develop effective solutions for haptic feedback in RMIS.
Figures

References
-
- Xin H, Zelek JS, Carnahan H. Laparoscopic surgery, perceptual limitations and force: A review.. First Canadian Student Conference on Biomedical Computing; Kingston, Ontario, Canada. 2006. No. 144.
-
- Burdea CG. Force and Touch Feedback for Virtual Reality. Wiley Interscience; New York: 1996.
-
- Jones L, Lederman S. Human Hand Function. Oxford University Press; New York: 2006.
-
- Lin MC, Otaduy MA, editors. Haptic Rendering: Foundations, Algorithms, and Applications. AK Peters, Ltd; London: 2008. [Provides a current and in-depth review of the field of haptics, focusing on virtual environments. Medical applications are covered]
-
- Hayward V, MacLean KE. Do it yourself haptics, Part-I. IEEE Robot. Autom. Mag. 2007;14(4):88–104.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
