

Walking flexibility after hemispherectomy: split-belt treadmill adaptation and feedback control
- PMID: 19074191
- PMCID: PMC2664447
- DOI: 10.1093/brain/awn333
Walking flexibility after hemispherectomy: split-belt treadmill adaptation and feedback control
Abstract
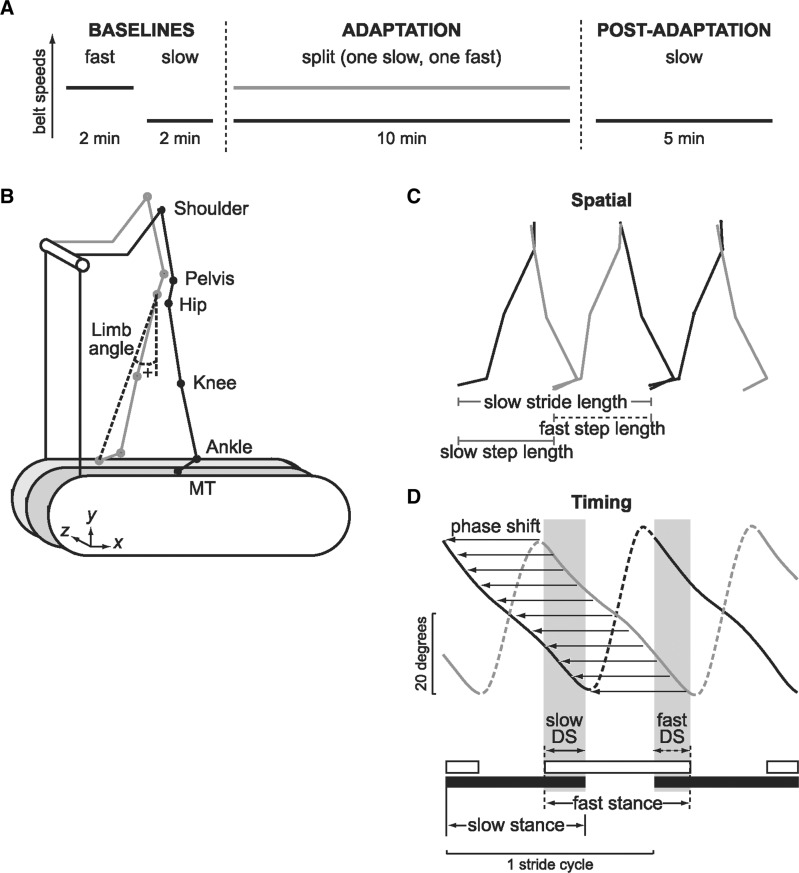
Walking flexibility depends on use of feedback or reactive control to respond to unexpected changes in the environment, and the ability to adapt feedforward or predictive control for sustained alterations. Recent work has demonstrated that cerebellar damage impairs feedforward adaptation, but not feedback control, during human split-belt treadmill walking. In contrast, focal cerebral damage from stroke did not impair either process. This led to the suggestion that cerebellar interactions with the brainstem are more important than those with cerebral structures for feedforward adaptation. Does complete removal of a cerebral hemisphere affect either of these processes? We studied split-belt walking in 10 children and adolescents (age 6-18 years) with hemispherectomy (i.e. surgical removal of one entire cerebral hemisphere) and 10 age- and sex-matched control subjects. Hemispherectomy did not impair reactive feedback control, though feedforward adaptation was impaired in some subjects. Specifically, some showed reduced or absent adaptation of inter-leg timing, whereas adaptation of spatial control was intact. These results suggest that the cerebrum is involved in adaptation of the timing, but not spatial, elements of limb movements.
Figures
References
-
- Armstrong DM. Supraspinal contributions to the initiation and control of locomotion in the cat. Prog Neurobiol. 1986;26:273–361. - PubMed
-
- Baron JC, Bousser MG, Comar D, Castaigne P. Crossed cerebellar diaschisis in human supratentorial brain infarction. Ann Neurol. 1980;8:128. - PubMed
-
- Batschelet E. London: Academic Press; 1981. Circular Statistics in Biology.
-
- Benecke R, Meyer BU, Freund HJ. Reorganisation of descending motor pathways in patients after hemispherectomy and severe hemispheric lesions demonstrated by magnetic brain stimulation. Exp Brain Res. 1991;83:419–26. - PubMed
-
- Berger W, Altenmueller E, Dietz V. Normal and impaired development of children's gait. Hum Neurobiol. 1984;3:163–70. - PubMed
