

Development of a mathematical model for predicting electrically elicited quadriceps femoris muscle forces during isovelocity knee joint motion
- PMID: 19077188
- PMCID: PMC2615438
- DOI: 10.1186/1743-0003-5-33
Development of a mathematical model for predicting electrically elicited quadriceps femoris muscle forces during isovelocity knee joint motion
Abstract
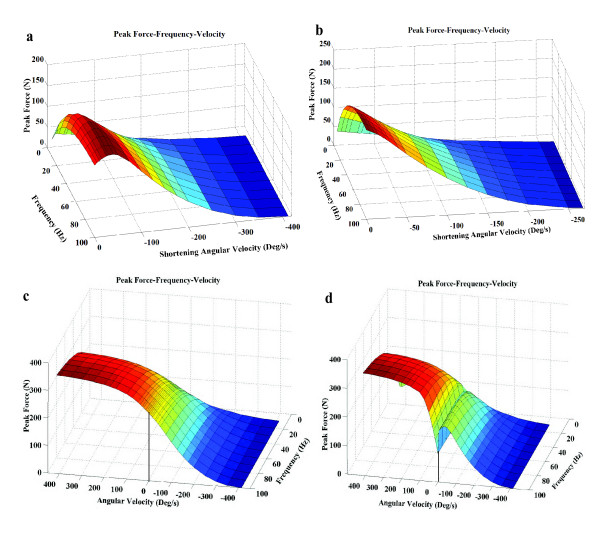
Background: Direct electrical activation of skeletal muscles of patients with upper motor neuron lesions can restore functional movements, such as standing or walking. Because responses to electrical stimulation are highly nonlinear and time varying, accurate control of muscles to produce functional movements is very difficult. Accurate and predictive mathematical models can facilitate the design of stimulation patterns and control strategies that will produce the desired force and motion. In the present study, we build upon our previous isometric model to capture the effects of constant angular velocity on the forces produced during electrically elicited concentric contractions of healthy human quadriceps femoris muscle. Modelling the isovelocity condition is important because it will enable us to understand how our model behaves under the relatively simple condition of constant velocity and will enable us to better understand the interactions of muscle length, limb velocity, and stimulation pattern on the force produced by the muscle.
Methods: An additional term was introduced into our previous isometric model to predict the force responses during constant velocity limb motion. Ten healthy subjects were recruited for the study. Using a KinCom dynamometer, isometric and isovelocity force data were collected from the human quadriceps femoris muscle in response to a wide range of stimulation frequencies and patterns. % error, linear regression trend lines, and paired t-tests were used to test how well the model predicted the experimental forces. In addition, sensitivity analysis was performed using Fourier Amplitude Sensitivity Test to obtain a measure of the sensitivity of our model's output to changes in model parameters.
Results: Percentage RMS errors between modelled and experimental forces determined for each subject at each stimulation pattern and velocity showed that the errors were in general less than 20%. The coefficients of determination between the measured and predicted forces show that the model accounted for approximately 86% and approximately 85% of the variances in the measured force-time integrals and peak forces, respectively.
Conclusion: The range of predictive abilities of the isovelocity model in response to changes in muscle length, velocity, and stimulation frequency for each individual make it ideal for dynamic applications like FES cycling.
Figures









Similar articles
-
Mathematical model that predicts lower leg motion in response to electrical stimulation.J Biomech. 2006;39(15):2826-36. doi: 10.1016/j.jbiomech.2005.09.021. Epub 2005 Nov 22. J Biomech. 2006. PMID: 16307749
-
Effect of electrical stimulation pattern on the force responses of paralyzed human quadriceps muscles.Muscle Nerve. 2007 Apr;35(4):471-8. doi: 10.1002/mus.20717. Muscle Nerve. 2007. PMID: 17212347
-
An approach to a muscle force model with force-pulse amplitude relationship of human quadriceps muscles.Comput Biol Med. 2018 Oct 1;101:218-228. doi: 10.1016/j.compbiomed.2018.08.026. Epub 2018 Sep 3. Comput Biol Med. 2018. PMID: 30199798
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
How muscles deal with real-world loads: the influence of length trajectory on muscle performance.J Exp Biol. 1999 Dec;202(Pt 23):3377-85. doi: 10.1242/jeb.202.23.3377. J Exp Biol. 1999. PMID: 10562520 Review.
Cited by
-
Dynamic optimization of stimulation frequency to reduce isometric muscle fatigue using a modified Hill-Huxley model.Muscle Nerve. 2018 Apr;57(4):634-641. doi: 10.1002/mus.25777. Epub 2017 Sep 18. Muscle Nerve. 2018. PMID: 28833237 Free PMC article.
-
Predicting non-isometric fatigue induced by electrical stimulation pulse trains as a function of pulse duration.J Neuroeng Rehabil. 2013 Feb 2;10:13. doi: 10.1186/1743-0003-10-13. J Neuroeng Rehabil. 2013. PMID: 23374142 Free PMC article.
-
Computational Design of FastFES Treatment to Improve Propulsive Force Symmetry During Post-stroke Gait: A Feasibility Study.Front Neurorobot. 2019 Oct 1;13:80. doi: 10.3389/fnbot.2019.00080. eCollection 2019. Front Neurorobot. 2019. PMID: 31632261 Free PMC article.
References
-
- Garland SJ, Griffin L. Motor unit double discharges: statistical anomaly or functional entity? Can J Appl Physiol. 1999;24:113–130. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous
