

doi: 10.1073/pnas.0807698106.
Epub 2009 Jan 12.
Tetherless thermobiochemically actuated microgrippers
Affiliations
- PMID: 19139411
- PMCID: PMC2630075
- DOI: 10.1073/pnas.0807698106
Item in Clipboard
Tetherless thermobiochemically actuated microgrippers
Proc Natl Acad Sci U S A.
.
Abstract
We demonstrate mass-producible, tetherless microgrippers that can be remotely triggered by temperature and chemicals under biologically relevant conditions. The microgrippers use a self-contained actuation response, obviating the need for external tethers in operation. The grippers can be actuated en masse, even while spatially separated. We used the microgrippers to perform diverse functions, such as picking up a bead on a substrate and the removal of cells from tissue embedded at the end of a capillary (an in vitro biopsy).
Conflict of interest statement
The authors declare no conflict of interest.
Figures

Schematic diagram depicting side and top views of the key steps in the fabrication and operation of the microgripper trilayer joints. (A) The bimetallic joint component (orange and light gray) was evaporated above the sacrificial layer (blue) and silicon (dark gray) substrate. The Cr layer (light gray) developed residual tensile stress during evaporation, denoted by σT. (B) The Ni phalange (green) and the polymer trigger layer (red) were then patterned above the bimetallic layer. (C) The sacrificial layer was dissolved to release the microgripper from the substrate in a planar, open configuration. (D) When heated or exposed to selected chemicals, mechanical property changes in the polymer trigger allowed the stressed bimetallic layer to flex.

Scanning electron microscope images highlighting variability in rotational symmetry, number of digits and palm shape, and number of joints per digit. (A and B) Closed microgrippers with a rotationally asymmetric (A) and symmetric (B) arrangement of digits around the central palm. Note the gap in gripper A that resulted because of the asymmetry. The Insets depict the layout of the gripper when open. (C–E) Closed grippers with pentagonal (C), hexagonal (D), and heptagonal (E) palms and a symmetric arrangement of digits. (F–H) Closed grippers with 2-jointed digits (F) and 3-jointed digits (G and H). The Insets depict the open configuration of each digit. (G) Empty gripper with 3 digits closed such that the distal phalange is parallel to the proximal phalange. (H) Gripper closed around a bead. When the bead was captured, the distal phalanges could not flex completely and pushed against the bead.

Dependence of the multilayer joint angle on thin film parameters. Predicted joint angles resulting from a change in polymer elasticity for various Cu thicknesses in the range of 200–250 nm (Cr was kept constant at 50 nm). The joint angles were predicted from a multilayer thin film model (details in SI Text ). The theoretical calculation reflects the change in the polymer elastic modulus and the resulting joint angle as the polymer layer of the joint is triggered with heat or chemicals.
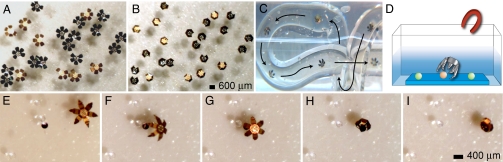
Thermally triggered actuation, magnetic manipulation, and bead capture. (A and B) Optical images of 23 grippers (face-up and face-down) triggered to close en masse by heating. (C) Overlaid movie sequence (Movie S1 ) showing the remote-controlled manipulation of a mobile gripper in a coiled tube. (D) Schematic diagram depicting remote, magnetically directed movement and capture of a bead on a substrate. (E–I) Optical microscopy sequence showing the remote-controlled, thermally triggered capture of a dyed bead (275 μm) from among several clear beads.

Thermally and biochemically triggered cell capture. (A–E) Optical microscopy sequence showing the thermally triggered capture and retrieval of Neutral red-stained cells from a cell culture mass at the end of a 1.5-mm-diameter tube (Movie S3 ). (F) Zoomed detail of the microgripper with the cells captured in A–E demonstrating viability (red). (G) Fluorescent micrograph demonstrating viability of thermally captured LIVE/DEAD stained cells. Note that the photopatternable polymer in the joints fluoresces red under UV excitation. (H) Fluorescent micrograph with viable cells (green) captured by using a thermal trigger and incubated for 72 h afterward. (I) Fluorescent micrograph of viable cells captured by using a biochemical trigger to actuate the gripper. (J) Optical image of a microgripper with captured cells from a sample of a bovine bladder. (K) Overlaid optical micrograph sequence depicting the traversing of a gripper from left to right through an orifice in a bovine bladder tissue sample.
References
-
- Angelo JA. Robotics, A Reference Guide to a New Technology. Westport, CT: Greenwood Press; 2006.
-
- Madden JD. Mobile robots: Motor challenges and materials solutions. Science. 2007;318:1094–1097. - PubMed
-
- Cecil J, Powell D, Vasquez D. Assembly and manipulation of micro devices—A state of the art survey. Robot Comput Integrated Manufacturing. 2007;23:580–588.
-
- Kim CJ, Pisano AP, Muller RS, Lim MG. Polysilicon microgripper. Sensors Actuators A Phys. 1992;33:221–227.
-
- Pister KSJ, Judy MW, Burgett SR, Fearing RS. Microfabricated hinges. Sensors Actuators A Phys. 1992;33:249–256.
Publication types
MeSH terms
Substances
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Research Materials
