

doi: 10.1109/IEMBS.2008.4649569.
Autoregressive nodeling of physiological tremor under microsurgical conditions
Affiliations
- PMID: 19163072
- PMCID: PMC3032442
- DOI: 10.1109/IEMBS.2008.4649569
Item in Clipboard
Autoregressive nodeling of physiological tremor under microsurgical conditions
Annu Int Conf IEEE Eng Med Biol Soc.
2008.
Abstract
Tremor was recorded under simulated vitreoretinal microsurgical conditions as subjects attempted to hold an instrument motionless. Several autoregressive models (AR, ARMA, multivariate, and nonlinear) are generated to predict the next value of tremor. It is shown that a sixth order ARMA model predictor can predict a tremor having an amplitude of 96.6 +/- 84.5 microns RMS with an error of 8.2 +/- 5.9 microns RMS, a mean improvement of 47.5% over simple last-value prediction.
Figures

(a) ASAP measuring and displaying instrument position on LCD screen. (b) Instrument tip with LEDs being inserted through face mask eye. The two notches on opposite sides function as simulated sclerotomies to brace the tool.

AR and ARMA results for X (top), Y (middle), and Z (bottom) tremor components for a typical subject under Scenario 1 (instrument braced against side of eye). For this sample, tremor amplitude is 45.4, 62.9, and 5.4 μm RMS in x, y, and z, respectively.

AR and ARMA results for X (top), Y (middle), and Z (bottom) tremor components under Scenario 2 (instrument not braced against side of eye). For this sample, tremor amplitude is 46.4, 31.9, and 24.1 μm RMS in x, y, and z, respectively.

AR and ARMA results for X (top), Y (middle), and Z (bottom) tremor components for a typical subject under Scenario 3 (instrument braced, but no visual feedback). For this sample, tremor amplitude is 254.0, 166.1, and 15.2 μm RMS in x, y, and z, respectively.

Mean percentage improvement for AR and ARMA in comparison with last-value prediction.

Box and whisker plot of the ARMA coefficients (the error term coefficients yield a similar plot with smaller coefficients).

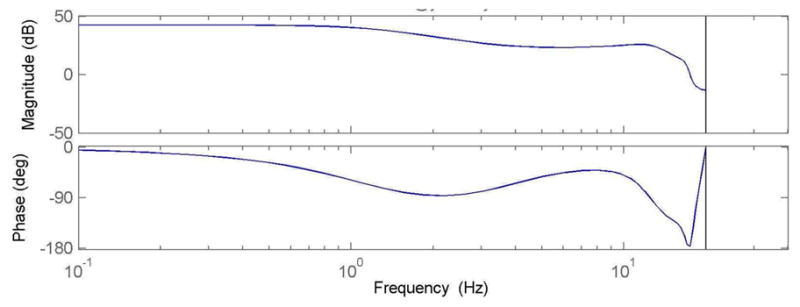
Bode diagram of sixth order mean ARMA model.
Bode diagram of Scenario 1 ARMA model for X component

Bode diagram of Scenario 1 ARMA model for Y component

Bode diagram of Scenario 1 ARMA model for Z component
Similar articles
-
A novel control architecture for physiological tremor compensation in teleoperated systems.Int J Med Robot. 2013 Sep;9(3):280-97. doi: 10.1002/rcs.1436. Epub 2012 May 16. Int J Med Robot. 2013. PMID: 22588805
-
Acousto-optic compensation of tremor for use in a handheld laser microsurgical instrument.Conf Proc IEEE Eng Med Biol Soc. 2006;2006:3862-4. doi: 10.1109/IEMBS.2006.260728. Conf Proc IEEE Eng Med Biol Soc. 2006. PMID: 17947056
-
Active tremor cancellation by a "smart" handheld vitreoretinal microsurgical tool using swept source optical coherence tomography.Opt Express. 2012 Oct 8;20(21):23414-21. doi: 10.1364/OE.20.023414. Opt Express. 2012. PMID: 23188305 Free PMC article.
-
Microsurgical robotic system for vitreoretinal surgery.Int J Comput Assist Radiol Surg. 2012 Jan;7(1):27-34. doi: 10.1007/s11548-011-0602-4. Epub 2011 May 15. Int J Comput Assist Radiol Surg. 2012. PMID: 21573828 Review.
-
Applications of robotics for laryngeal surgery.Otolaryngol Clin North Am. 2008 Aug;41(4):781-91, vii. doi: 10.1016/j.otc.2008.01.021. Otolaryngol Clin North Am. 2008. PMID: 18570959 Free PMC article. Review.
Cited by
-
Comparison of Baseline Tremor Under Various Microsurgical Conditions.Conf Proc IEEE Int Conf Syst Man Cybern. 2013:1482-1487. doi: 10.1109/SMC.2013.256. Conf Proc IEEE Int Conf Syst Man Cybern. 2013. PMID: 24752457 Free PMC article.
-
Using a Microsurgical Robotic Platform for In-flap Anastomosis in Autologous Bipedicular Breast Reconstruction.Plast Reconstr Surg Glob Open. 2024 Jan 10;12(1):e5511. doi: 10.1097/GOX.0000000000005511. eCollection 2024 Jan. Plast Reconstr Surg Glob Open. 2024. PMID: 38204872 Free PMC article.
References
-
- Elble RJ, Koller WC. Tremor. Baltimore: Johns Hopkins; 1990.
-
- Morrison S, Keogh J. Changes in the dynamics of tremor during goal-directed pointing. Hum Mov Sci. 2001;20:675–693. - PubMed
-
- Timmer J. Modeling noisy time series: physiological tremor. Int J Bifurcation Chaos. 1998;8:1505–1516.
-
- Taylor RH, Jensen P, Whitcomb LL, Barnes AC, Kumar R, Stoianovici D, Gupta P, Wang ZX, deJuan E, Kavoussi LR. A steady-hand robotic system for microsurgical augmentation. 2nd Int Conf Med Image Comput Comput Assist Intervention. 1999:1031–1041.
-
- Riviere CN, Ang WT, Khosla PK. Toward active tremor canceling in handheld microsurgical instruments. IEEE Trans Robot Autom. 2003;19:793–800.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
Research Materials