

Spatial disorientation in gondola centrifuges predicted by the form of motion as a whole in 3-D
- PMID: 19198199
- PMCID: PMC2749651
- DOI: 10.3357/asem.2344.2009
Spatial disorientation in gondola centrifuges predicted by the form of motion as a whole in 3-D
Abstract
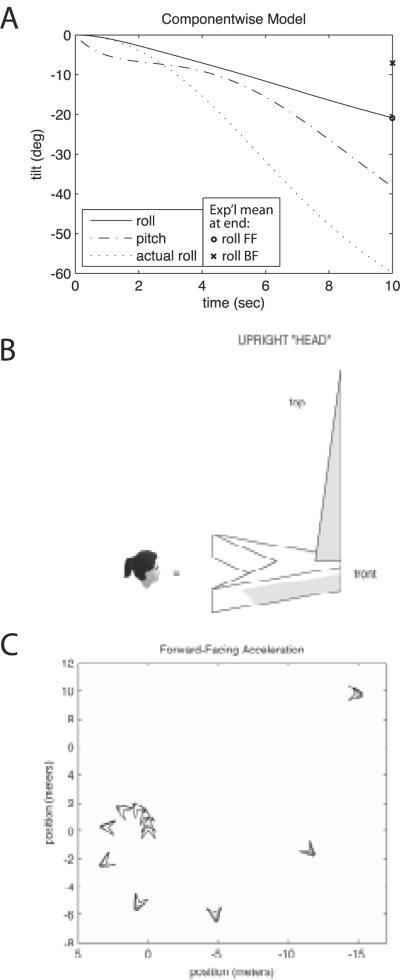
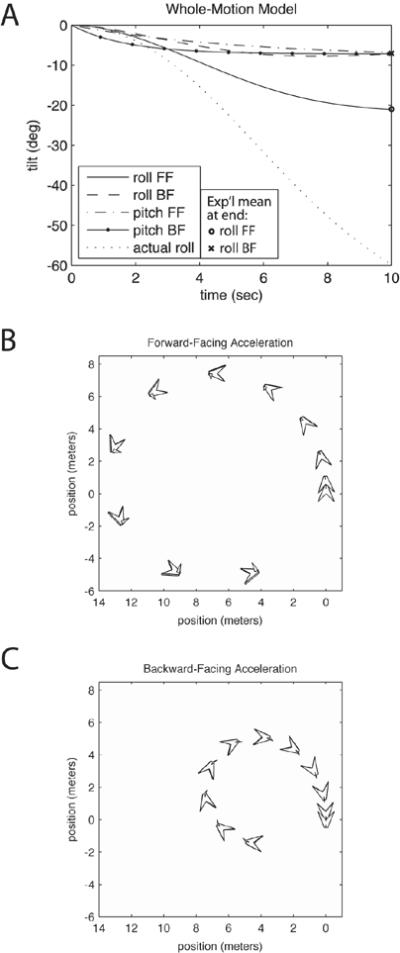
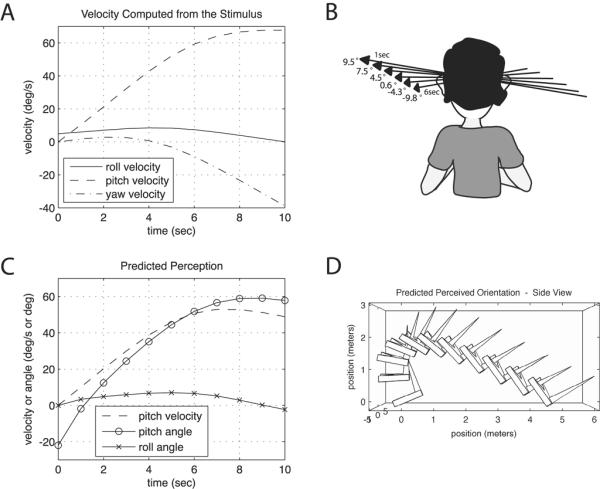
Introduction: During a coordinated turn, subjects can misperceive tilts. Subjects accelerating in tilting-gondola centrifuges without external visual reference underestimate the roll angle, and underestimate more when backward-facing than when forward-facing. In addition, during centrifuge deceleration, the perception of pitch can include tumble while paradoxically maintaining a fixed perceived pitch angle. The goal of the present research was to test two competing hypotheses: 1) that components of motion are perceived relatively independently and then combined to form a three-dimensional (3-D) perception; and 2) that perception is governed by familiarity of motions as a whole in three dimensions, with components depending more strongly on the overall shape of the motion.
Methods: Published experimental data from existing tilting-gondola centrifuge studies were used. The two hypotheses were implemented formally in computer models, and centrifuge acceleration and deceleration were simulated.
Results: The second, whole-motion oriented hypothesis better predicted subjects' perceptions, including the forward-backward asymmetry and the paradoxical tumble upon deceleration. The predominant stimulus at the beginning of the motion and the familiarity of centripetal acceleration were important factors.
Conclusion: Three-dimensional perception is better predicted by taking into account familiarity with the form of 3-D motion.
Figures
Similar articles
-
Whole-motion model of perception during forward- and backward-facing centrifuge runs.J Vestib Res. 2008;18(4):171-86. J Vestib Res. 2008. PMID: 19208962 Free PMC article.
-
Three-dimensional baselines for perceived self-motion during acceleration and deceleration in a centrifuge.J Vestib Res. 1997 Jan-Feb;7(1):45-61. J Vestib Res. 1997. PMID: 9057159
-
Baselines for three-dimensional perception of combined linear and angular self-motion with changing rotational axis.J Vestib Res. 2000;10(4-5):163-78. J Vestib Res. 2000. PMID: 11354430
-
Perception of motion and position relative to the earth. An overview.Ann N Y Acad Sci. 1992 May 22;656:315-28. doi: 10.1111/j.1749-6632.1992.tb25218.x. Ann N Y Acad Sci. 1992. PMID: 1599152 Review.
-
Semicircular Canal Size and Shape Influence on Disorientation.Aerosp Med Hum Perform. 2018 Aug 1;89(8):744-748. doi: 10.3357/AMHP.5104.2018. Aerosp Med Hum Perform. 2018. PMID: 30020060 Review.
Cited by
-
Spatial orientation during gondola centrifugation with subjects upright versus supine: Evidence for Gestalt psychological mechanisms in vestibular perception.J Vestib Res. 2021;31(6):451-467. doi: 10.3233/VES-201527. J Vestib Res. 2021. PMID: 33646191 Free PMC article.
-
Visual measures of perceived roll tilt in pilots during coordinated flight and gondola centrifugation.J Vestib Res. 2023;33(1):1-19. doi: 10.3233/VES-220016. J Vestib Res. 2023. PMID: 36442173 Free PMC article.
-
Phase-linking and the perceived motion during off-vertical axis rotation.Biol Cybern. 2010 Jan;102(1):9-29. doi: 10.1007/s00422-009-0347-0. Epub 2009 Nov 24. Biol Cybern. 2010. PMID: 19937069 Free PMC article.
-
Differences between perception and eye movements during complex motions.J Vestib Res. 2011;21(4):193-208. doi: 10.3233/VES-2011-0416. J Vestib Res. 2011. PMID: 21846952 Free PMC article.
-
Asymmetries and three-dimensional features of vestibular cross-coupled stimuli illuminated through modeling.J Vestib Res. 2016 Nov 3;26(4):343-358. doi: 10.3233/VES-160585. J Vestib Res. 2016. PMID: 27814310 Free PMC article.
References
-
- Angelaki DE, Shaikh AG, Green AM, Dickman JD. Neurons compute internal models of the physical laws of motion. Nature. 2004;430:560–4. - PubMed
-
- Bles W, de Graaf B. Postural consequences of long duration centrifugation. J Vestib Res. 1993;3:87–95. - PubMed
-
- Boring EG, Langfeld HS, Weld HP. Foundations of Psychology. New York: John Wiley and Sons, Inc.; 1948.
-
- Bos JE, Bles W. Theoretical considerations on canal-otolith interaction and an observer model. Biol Cybern. 2002;86:191–207. - PubMed
-
- Clément G, Maciel F, Deguine O. Perception of tilt and ocular torsion of normal human subjects during eccentric rotation. Otol Neurotol. 2002;23:958–66. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources