

Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms
- PMID: 19211469
- PMCID: PMC3036162
- DOI: 10.1001/jama.2009.116
Targeted muscle reinnervation for real-time myoelectric control of multifunction artificial arms
Abstract
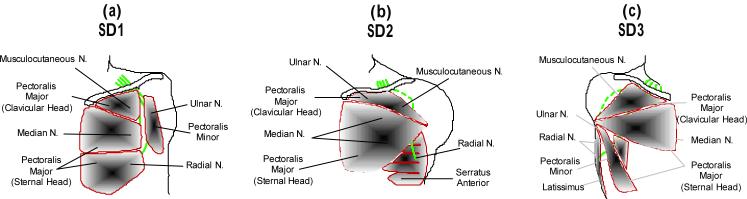
Context: Improving the function of prosthetic arms remains a challenge, because access to the neural-control information for the arm is lost during amputation. A surgical technique called targeted muscle reinnervation (TMR) transfers residual arm nerves to alternative muscle sites. After reinnervation, these target muscles produce electromyogram (EMG) signals on the surface of the skin that can be measured and used to control prosthetic arms.
Objective: To assess the performance of patients with upper-limb amputation who had undergone TMR surgery, using a pattern-recognition algorithm to decode EMG signals and control prosthetic-arm motions.
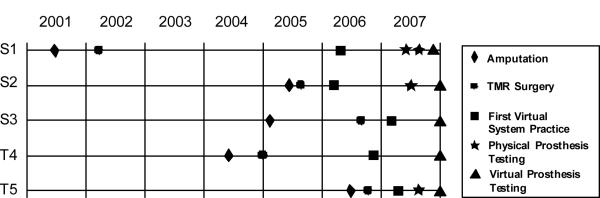
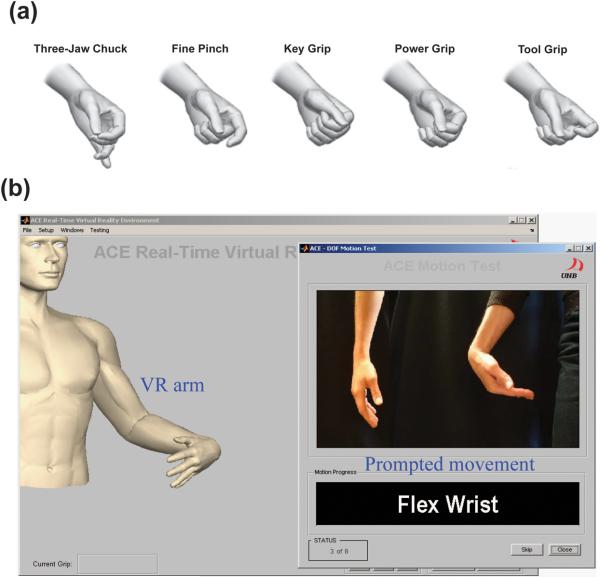
Design, setting, and participants: Study conducted between January 2007 and January 2008 at the Rehabilitation Institute of Chicago among 5 patients with shoulder-disarticulation or transhumeral amputations who underwent TMR surgery between February 2002 and October 2006 and 5 control participants without amputation. Surface EMG signals were recorded from all participants and decoded using a pattern-recognition algorithm. The decoding program controlled the movement of a virtual prosthetic arm. All participants were instructed to perform various arm movements, and their abilities to control the virtual prosthetic arm were measured. In addition, TMR patients used the same control system to operate advanced arm prosthesis prototypes.
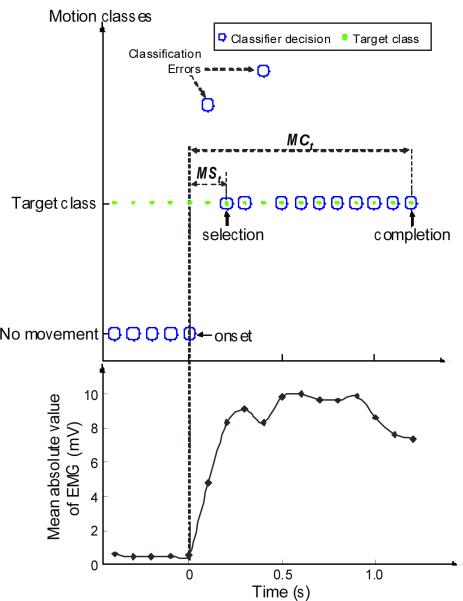
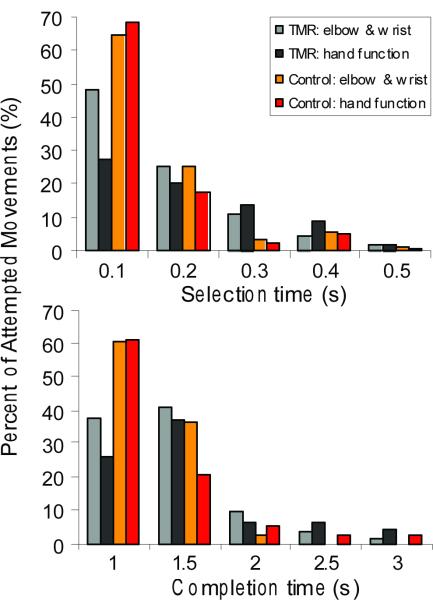
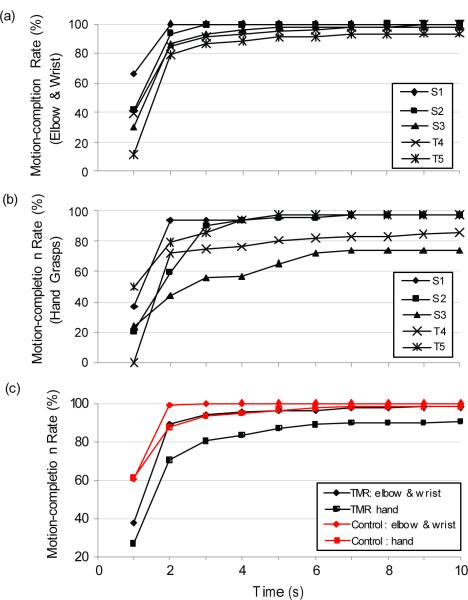
Main outcome measure: Performance metrics measured during virtual arm movements included motion selection time, motion completion time, and motion completion ("success") rate.
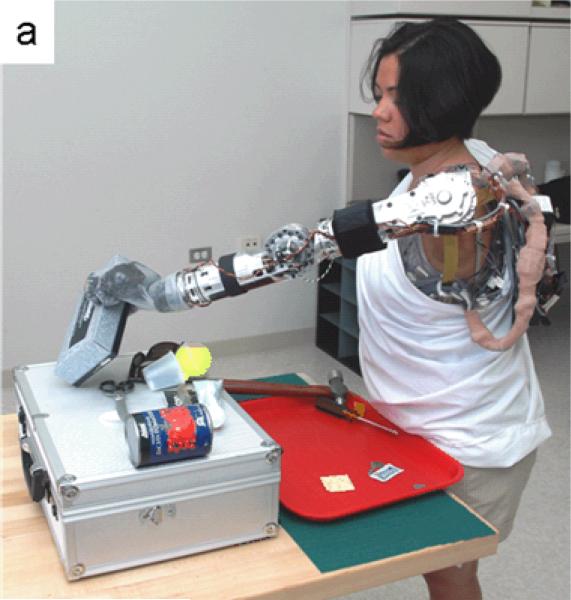
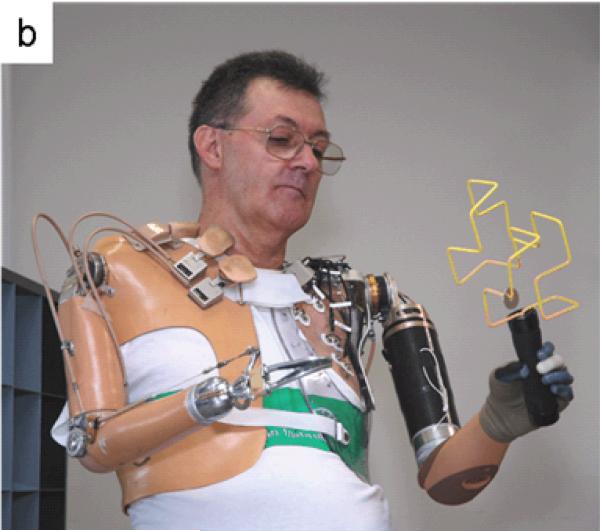
Results: The TMR patients were able to repeatedly perform 10 different elbow, wrist, and hand motions with the virtual prosthetic arm. For these patients, the mean motion selection and motion completion times for elbow and wrist movements were 0.22 seconds (SD, 0.06) and 1.29 seconds (SD, 0.15), respectively. These times were 0.06 seconds and 0.21 seconds longer than the mean times for control participants. For TMR patients, the mean motion selection and motion completion times for hand-grasp patterns were 0.38 seconds (SD, 0.12) and 1.54 seconds (SD, 0.27), respectively. These patients successfully completed a mean of 96.3% (SD, 3.8) of elbow and wrist movements and 86.9% (SD, 13.9) of hand movements within 5 seconds, compared with 100% (SD, 0) and 96.7% (SD, 4.7) completed by controls. Three of the patients were able to demonstrate the use of this control system in advanced prostheses, including motorized shoulders, elbows, wrists, and hands.
Conclusion: These results suggest that reinnervated muscles can produce sufficient EMG information for real-time control of advanced artificial arms.
Figures

Comment in
-
Taking control of prosthetic arms.JAMA. 2009 Feb 11;301(6):670-1. doi: 10.1001/jama.2009.112. JAMA. 2009. PMID: 19211476 No abstract available.
References
-
- Sears HH. Trends in upper-extremity prosthetics development. In: Bowker HK, Michael JW, editors. Altas of limb prosthetics: Surgical, prosthetic, and rehabilitation principles. 2 ed. American Academy of Orthopedic Surgeons; Rosemont, IL: 1992.
-
- Parker PA, Scott RN. Myoelectric control of prostheses. Crit Rev Biomed Eng. 1986;13(4):283–310. - PubMed
-
- Hudgins B, Parker P, Scott RN. A new strategy for multifunction myoelectric control. IEEE Trans Biomed Eng. 1993;40(1):82–94. - PubMed
-
- Huang YH, Englehart KB, Hudgins B, Chan ADC. A gaussian mixture model based classification scheme for myoelectric control of powered upper limb prostheses. IEEE Trans Biomed Eng. 2005;52(11):1801–1811. - PubMed
-
- Ajiboye AB, Weir RF. A heuristic fuzzy logic approach to emg pattern recognition for multifunctional prosthesis control. IEEE Trans Neural Syst Rehabil Eng. 2005;13(3):280–291. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
