

Motor task variation induces structural learning
- PMID: 19217296
- PMCID: PMC2669412
- DOI: 10.1016/j.cub.2009.01.036
Motor task variation induces structural learning
Abstract
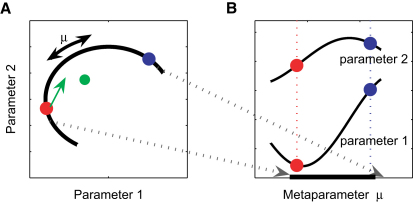
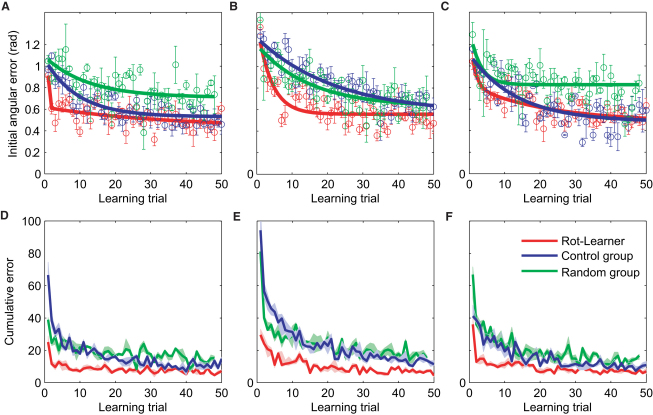
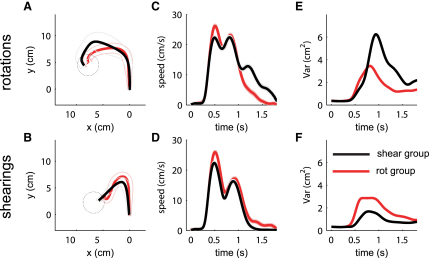
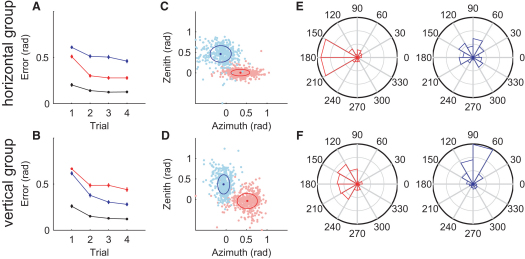
When we have learned a motor skill, such as cycling or ice-skating, we can rapidly generalize to novel tasks, such as motorcycling or rollerblading [1-8]. Such facilitation of learning could arise through two distinct mechanisms by which the motor system might adjust its control parameters. First, fast learning could simply be a consequence of the proximity of the original and final settings of the control parameters. Second, by structural learning [9-14], the motor system could constrain the parameter adjustments to conform to the control parameters' covariance structure. Thus, facilitation of learning would rely on the novel task parameters' lying on the structure of a lower-dimensional subspace that can be explored more efficiently. To test between these two hypotheses, we exposed subjects to randomly varying visuomotor tasks of fixed structure. Although such randomly varying tasks are thought to prevent learning, we show that when subsequently presented with novel tasks, subjects exhibit three key features of structural learning: facilitated learning of tasks with the same structure, strong reduction in interference normally observed when switching between tasks that require opposite control strategies, and preferential exploration along the learned structure. These results suggest that skill generalization relies on task variation and structural learning.
Figures
References
-
- Bernstein N.A. Pergamon Press; Oxford, NY: 1967. The Co-ordination and Regulation of Movements.
-
- Poggio T., Bizzi E. Generalization in vision and motor control. Nature. 2004;431:768–774. - PubMed
-
- Abeele S., Bock O. Mechanisms for sensorimotor adaptation to rotated visual input. Exp. Brain Res. 2001;139:248–253. - PubMed
-
- Bock O., Schneider S., Bloomberg J. Conditions for interference versus facilitation during sequential sensorimotor adaptation. Exp. Brain Res. 2001;138:359–365. - PubMed
-
- Roller C.A., Cohen H.S., Kimball K.T., Bloomberg J.J. Variable practice with lenses improves visuo-motor plasticity. Brain Res. Cogn. Brain Res. 2001;12:341–352. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
