

A fully implantable 96-channel neural data acquisition system
- PMID: 19255459
- PMCID: PMC2680289
- DOI: 10.1088/1741-2560/6/2/026002
A fully implantable 96-channel neural data acquisition system
Abstract
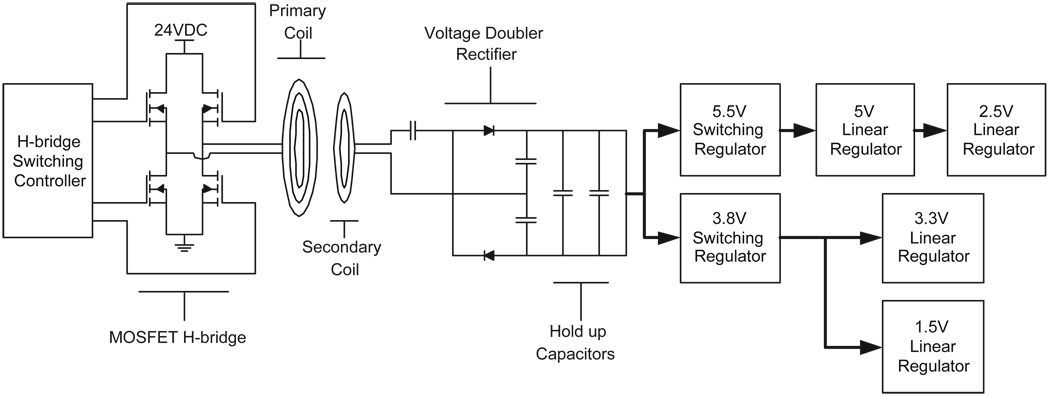
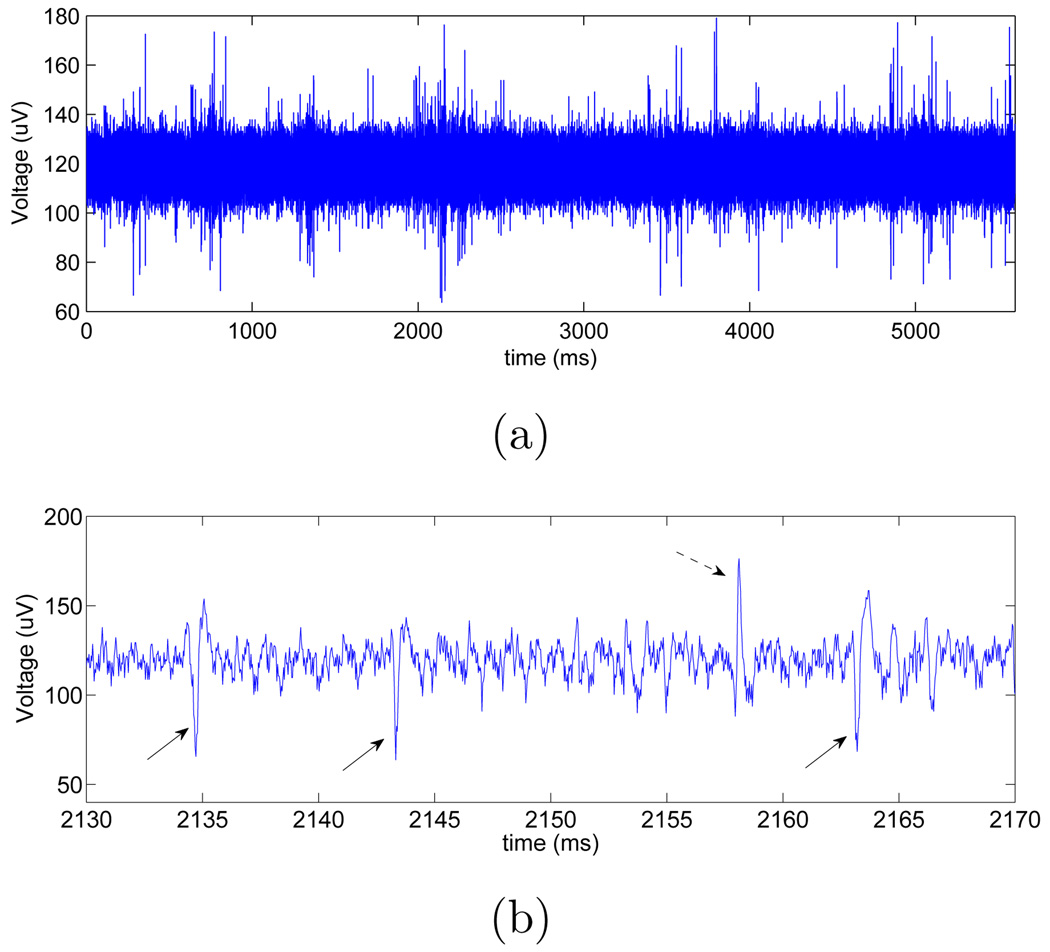
A fully implantable neural data acquisition system is a key component of a clinically viable brain-machine interface. This type of system must communicate with the outside world and obtain power without the use of wires that cross through the skin. We present a 96-channel fully implantable neural data acquisition system. This system performs spike detection and extraction within the body and wirelessly transmits data to an external unit. Power is supplied wirelessly through the use of inductively coupled coils. The system was implanted acutely in sheep and successfully recorded, processed and transmitted neural data. Bidirectional communication between the implanted system and an external unit was successful over a range of 2 m. The system is also shown to integrate well into a brain-machine interface. This demonstration of a high channel-count fully implanted neural data acquisition system is a critical step in the development of a clinically viable brain-machine interface.
Figures










References
-
- Serruya MD, Hatsopoulos NG, Paninski L, Fellows MR, Donoghue JP. Instant neural control of a movement signal. Nature. 2002 Mar;416(6877):141–142. - PubMed
-
- Taylor DM, Tillery SI, Schwartz AB. Direct cortical control of 3d neuroprosthetic devices. Science. 2002 Jun;296(5574):1829–1832. - PubMed
-
- Kennedy PR, Bakay RAE, Moore MM, Adams K, Goldwaithe J. Direct control of a computer from the human central nervous system. IEEE Trans Rehabil Eng. 2000 Jun;8(2):198–202. - PubMed
-
- Patil PG, Carmena JM, Nicolelis MAL, Turner DA. Ensemble recordings of human subcortical neurons as a source of motor control signals for a brain-machine interface. Neurosurgery. 2004 Jul;55(1):27–38. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources