

Review
doi: 10.1007/s00426-009-0242-2.
Epub 2009 Apr 4.
Tool use and the distalization of the end-effector
Affiliations
- PMID: 19347356
- PMCID: PMC2734956
- DOI: 10.1007/s00426-009-0242-2
Item in Clipboard
Review
Tool use and the distalization of the end-effector
Psychol Res.
2009 Jul.
Abstract
We review recent neurophysiological data from macaques and humans suggesting that the use of tools extends the internal representation of the actor's hand, and relate it to our modeling of the visual control of grasping. We introduce the idea that, in addition to extending the body schema to incorporate the tool, tool use involves distalization of the end-effector from hand to tool. Different tools extend the body schema in different ways, with a displaced visual target and a novel, task-specific processing of haptic feedback to the hand. This distalization is critical in order to exploit the unique functional capacities engendered by complex tools.
Figures
A compound of a side grasp and a power grasp for holding a screwdriver
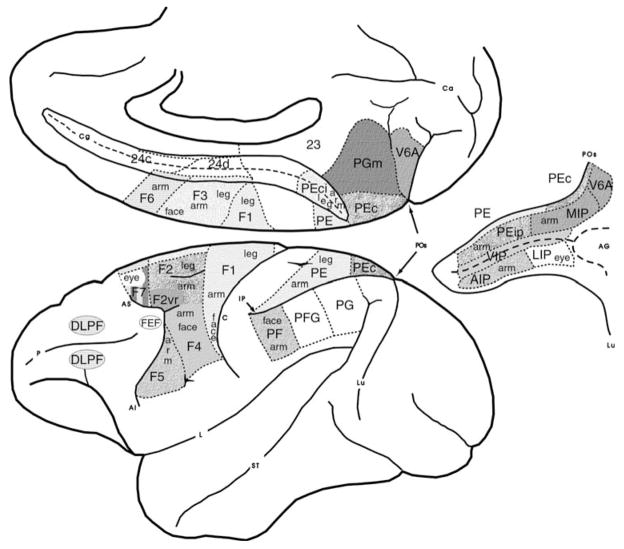
A view of macaque brain areas involved in basic parieto-frontal interactions for visually directed hand movements (from Matelli & Luppino, 2001). We will see that inferotemporal cortex and prefrontal cortex play a major role in modulating these interactions
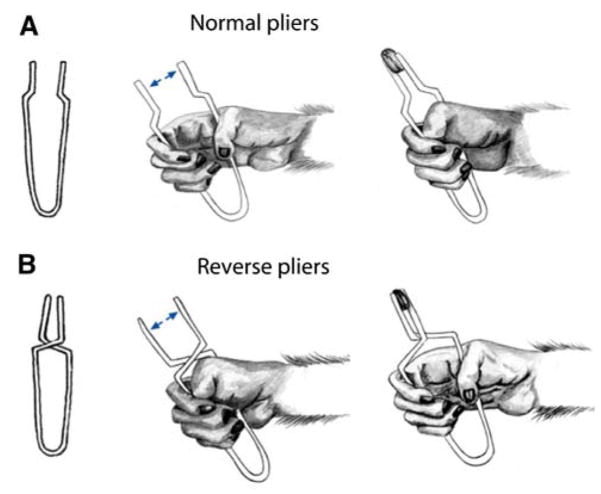
Schematic illustration of the paradigm used by Umiltà et al. (2008) to dissociate motion of the end-effector (jaws of the pliers) from the hand movements required to achieving it. To grasp the object in a precision pinch using normal pliers (a) the monkey has to close its hand in a power grasp, while with the reverse pliers (b) the monkey has to release a power grasp
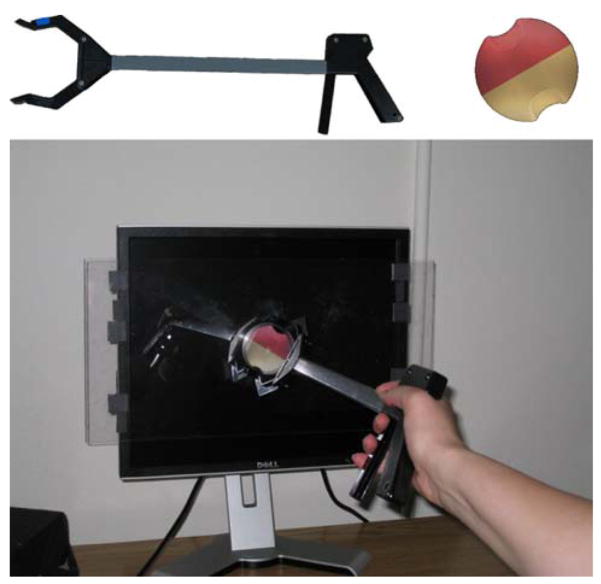
Novel tool and a sample of the stimulus object. Bottom a participant is shown grasping the object with the tool in the right hand during the overt grasp selection (OGS) task
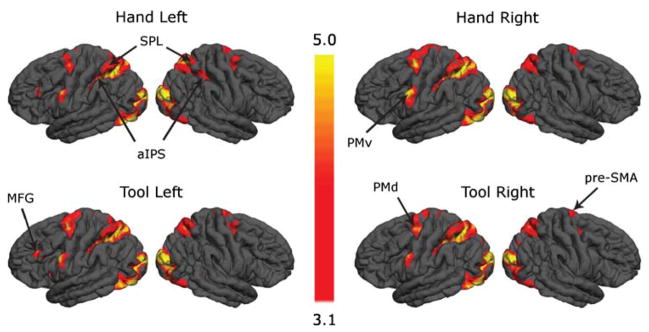
Increased neural activity associated with planning grasping actions with the hands or the tool relative to resting baseline. Selecting grips (PGS task) based on either hand or on the tool was consistently associated with activations within left aIPS and PMv, the putative homologs of the macaque AIP-F5 grasp circuit. In addition, activity was increased within and along the intra-parietal sulcus, as well as in bilateral superior parietal lobule (SPL) and dorsal premotor cortex (PMd), and in pre-SMA. Other structures were also activated only in some conditions, such as the right aIPS and the left middle frontal gyrus (MFG). (Jacobs et al., 2009)

The complete FARS model. (adapted from the original FARS figure of Fagg & Arbib, 1998)
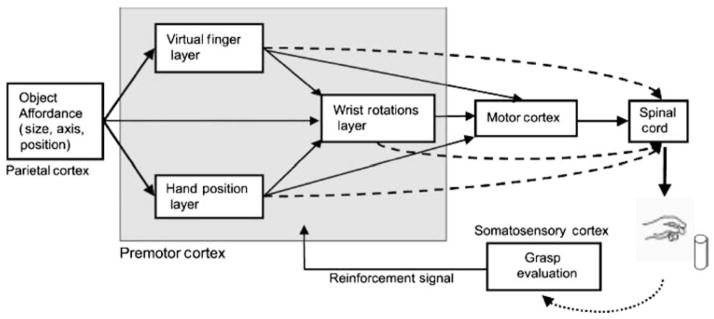
The structure of the infant learning to grasp model (ILGM) (Oztop et al., 2004). The individual layers inside the gray box are trained based on a Joy of Grasping reinforcement signal arising from somatosensory feedback which increases with the stability of the current grasp
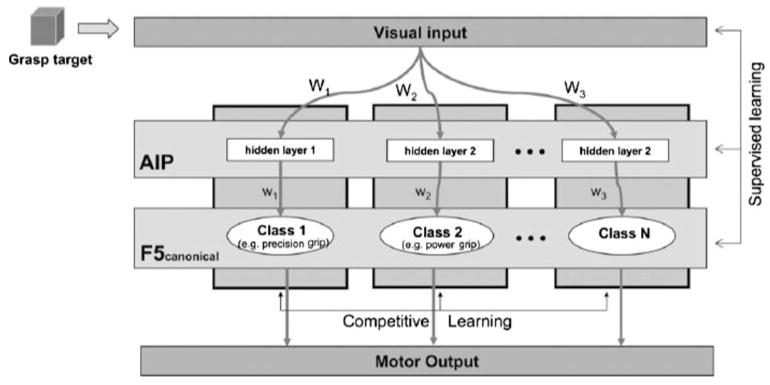
The grasp affordance learning model (GAEM) derives its training inputs from ILGM. The successful grasping movements provide the basis for learning by GAEM: vertical learning, supervised; horizontal learning, competitive (Oztop et al., 2007)
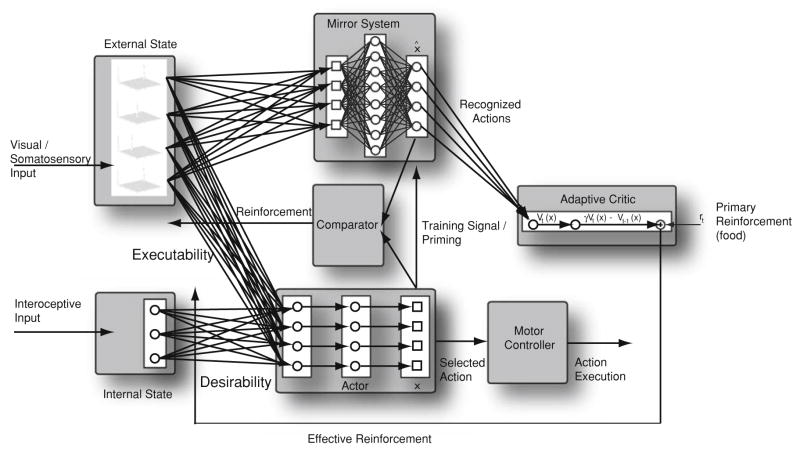
A simplified version of the augmented competitive queuing (ACQ) system as structured for the sequencing of actions in general. A crucial change here is that the mirror system can support the representation of multiple actions. Thus, during a self movement, the mirror system can represent both the intended action as well as any other action whose external appearance matches the actual performance. In ACQ, the Actor selects for execution the action that has the highest current priority, defined as a combination of executability and desirability. Desirability is the expected reinforcement for executing an action in the current internal state (which may combine homeostatic variables and cognitive subgoals). Estimates of desirability are updated by the Critic, which employs temporal difference (TD) learning. A crucial innovation here is that the Critic assesses not only the current action but also those apparent actions reported by the Mirror System in making its assessments
Similar articles
-
Neural mechanisms of spatial stimulus-response compatibility: the effect of crossed-hand position.Exp Brain Res. 2004 Sep;158(1):9-17. doi: 10.1007/s00221-004-1872-7. Epub 2004 Mar 17. Exp Brain Res. 2004. PMID: 15029467
-
Cerebellar and premotor function in bimanual coordination: parametric neural responses to spatiotemporal complexity and cycling frequency.Neuroimage. 2004 Apr;21(4):1416-27. doi: 10.1016/j.neuroimage.2003.12.011. Neuroimage. 2004. PMID: 15050567
-
Motor abstraction: a neuroscientific account of how action goals and intentions are mapped and understood.Psychol Res. 2009 Jul;73(4):486-98. doi: 10.1007/s00426-009-0232-4. Epub 2009 Apr 21. Psychol Res. 2009. PMID: 19381683 Review.
-
Brain activation during manipulation of the myoelectric prosthetic hand: a functional magnetic resonance imaging study.Neuroimage. 2004 Apr;21(4):1604-11. doi: 10.1016/j.neuroimage.2003.12.001. Neuroimage. 2004. PMID: 15050584
-
Using transcranial magnetic stimulation methods to probe connectivity between motor areas of the brain.Hum Mov Sci. 2011 Oct;30(5):906-15. doi: 10.1016/j.humov.2010.07.007. Epub 2010 Nov 5. Hum Mov Sci. 2011. PMID: 21056490 Review.
Cited by
-
Grasping with the Press of a Button: Grasp-selective Responses in the Human Anterior Intraparietal Sulcus Depend on Nonarbitrary Causal Relationships between Hand Movements and End-effector Actions.J Cogn Neurosci. 2015 Jun;27(6):1146-60. doi: 10.1162/jocn_a_00766. Epub 2014 Dec 1. J Cogn Neurosci. 2015. PMID: 25436672 Free PMC article.
-
Mirror neurons in the tree of life: mosaic evolution, plasticity and exaptation of sensorimotor matching responses.Biol Rev Camb Philos Soc. 2017 Aug;92(3):1819-1841. doi: 10.1111/brv.12310. Epub 2016 Nov 16. Biol Rev Camb Philos Soc. 2017. PMID: 27862868 Free PMC article. Review.
-
Complex tools and motor-to-mechanical transformations.Sci Rep. 2022 May 16;12(1):8041. doi: 10.1038/s41598-022-12142-3. Sci Rep. 2022. PMID: 35577883 Free PMC article.
-
The effect of aging and contextual information on manual asymmetry in tool use.Exp Brain Res. 2018 Aug;236(8):2347-2362. doi: 10.1007/s00221-018-5304-5. Epub 2018 Jun 8. Exp Brain Res. 2018. PMID: 29947955
-
Handedness-dependent and -independent cerebral asymmetries in the anterior intraparietal sulcus and ventral premotor cortex during grasp planning.Neuroimage. 2011 Jul 15;57(2):502-12. doi: 10.1016/j.neuroimage.2011.04.036. Epub 2011 Apr 30. Neuroimage. 2011. PMID: 21554968 Free PMC article.
References
-
- Alexander GE, Crutcher MD. Neural representations of the target (goal) of visually guided arm movements in three motor areas of the monkey. Journal of Neurophysiology. 1990;64:164–178. - PubMed
-
- Arbib MA. Perceptual structures and distributed motor control. In: Brooks VB, editor. Handbook of physiology—the nervous system II. motor control. American Physiological Society; 1981. pp. 1449–1480.
-
- Arbib MA, Bonaiuto JB. From grasping to complex imitation: modeling mirror systems on the evolutionary path to language. Mind & Society. 2008;7:43–64.
-
- Arbib MA, Iberall T, Lyons D. Coordinated control programs for control of the hands. In: Goodwin AW, Darian-Smith I, editors. Hand function and the neocortex. Berlin: Springer; 1985. pp. 111–129.
-
- Arbib MA, Schweighofer N, Thach WT. Modeling the cerebellum: from adaptation to coordination. In: Glencross DJ, Piek JP, editors. Motor Control and Sensory-Motor Integration: Issues and Directions. North Holland: Elsevier; 1995. pp. 11–36.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
