

Modular control of human walking: a simulation study
- PMID: 19394023
- PMCID: PMC2696580
- DOI: 10.1016/j.jbiomech.2009.03.009
Modular control of human walking: a simulation study
Abstract
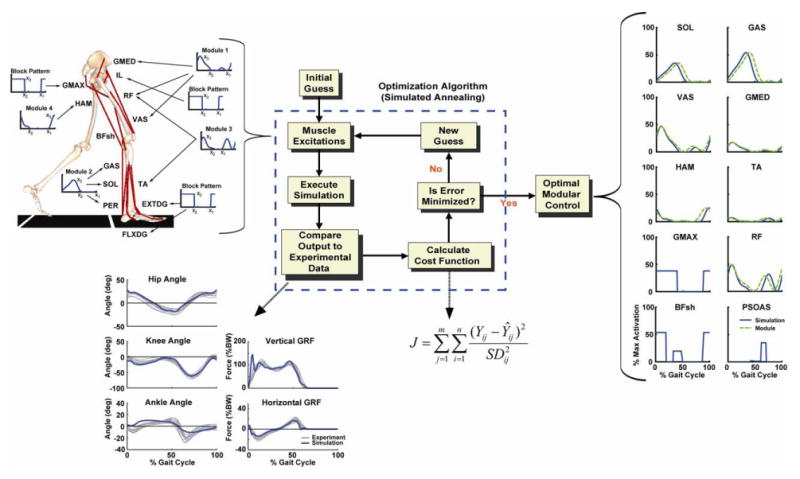
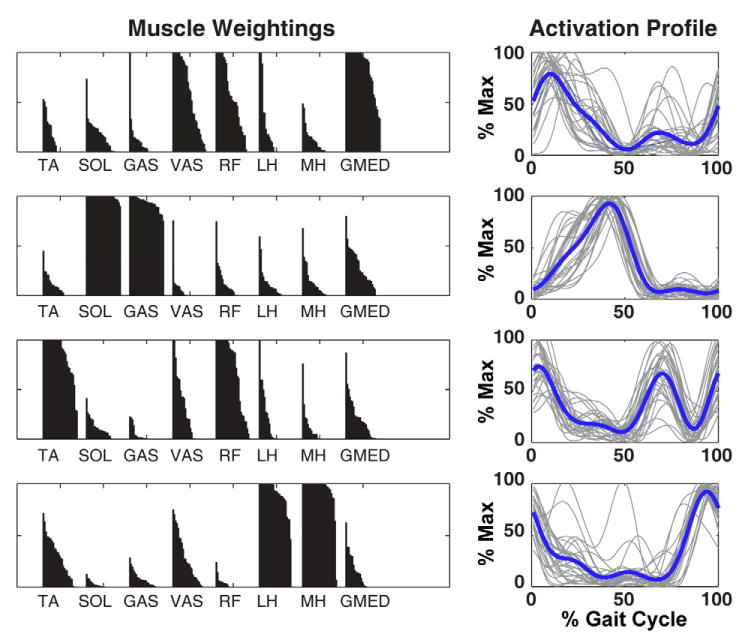
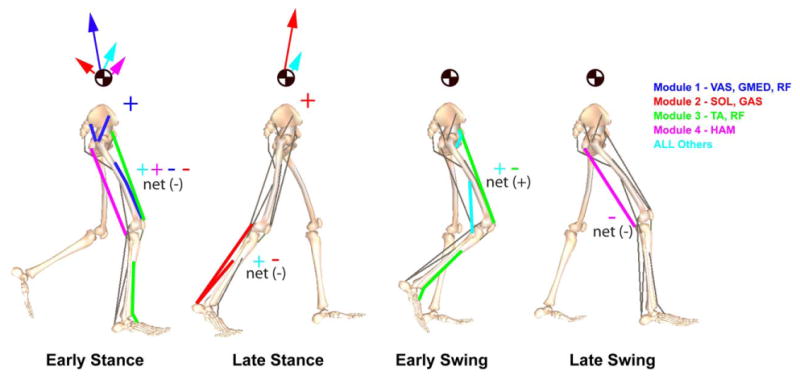
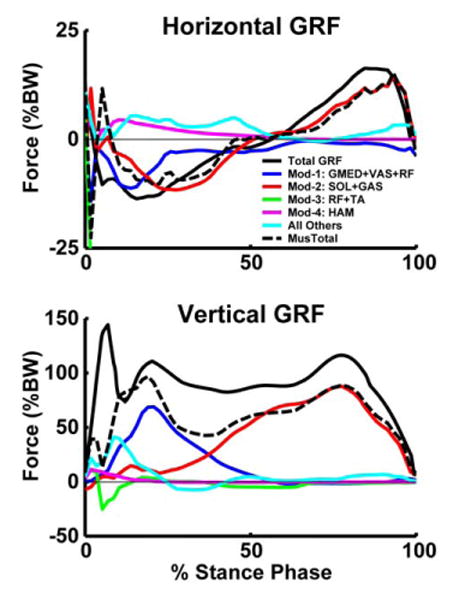
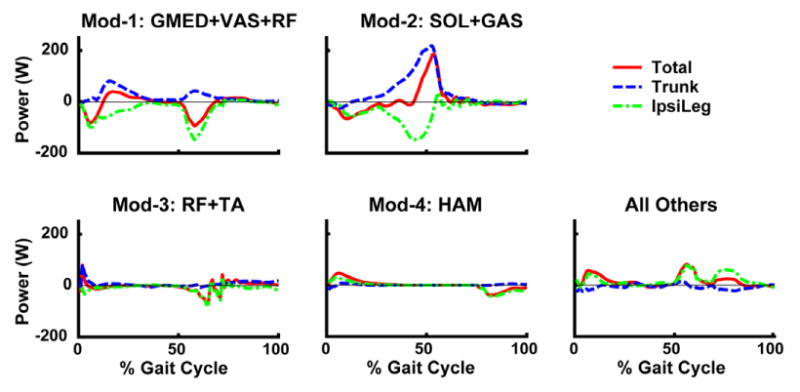
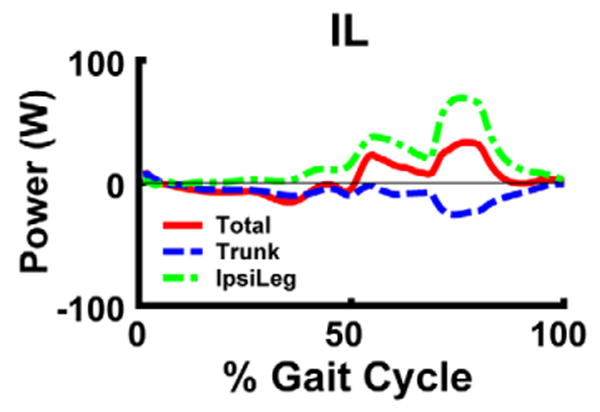
Recent evidence suggests that performance of complex locomotor tasks such as walking may be accomplished using a simple underlying organization of co-active muscles, or "modules", which have been assumed to be structured to perform task-specific biomechanical functions. However, no study has explicitly tested whether the modules would actually produce the biomechanical functions associated with them or even produce a well-coordinated movement. In this study, we generated muscle-actuated forward dynamics simulations of normal walking using muscle activation modules (identified using non-negative matrix factorization) as the muscle control inputs to identify the contributions of each module to the biomechanical sub-tasks of walking (i.e., body support, forward propulsion, and leg swing). The simulation analysis showed that a simple neural control strategy involving five muscle activation modules was sufficient to perform the basic sub-tasks of walking. Module 1 (gluteus medius, vasti, and rectus femoris) primarily contributed to body support in early stance while Module 2 (soleus and gastrocnemius) contributed to both body support and propulsion in late stance. Module 3 (rectus femoris and tibialis anterior) acted to decelerate the leg in early and late swing while generating energy to the trunk throughout swing. Module 4 (hamstrings) acted to absorb leg energy (i.e., decelerate it) in late swing while increasing the leg energy in early stance. Post-hoc analysis revealed an additional module (Module 5: iliopsoas) acted to accelerate the leg forward in pre- and early swing. These results provide evidence that the identified modules can act as basic neural control elements that generate task-specific biomechanical functions to produce well-coordinated walking.
Figures
Similar articles
-
Three-dimensional modular control of human walking.J Biomech. 2012 Aug 9;45(12):2157-63. doi: 10.1016/j.jbiomech.2012.05.037. Epub 2012 Jun 21. J Biomech. 2012. PMID: 22727468 Free PMC article.
-
The influence of merged muscle excitation modules on post-stroke hemiparetic walking performance.Clin Biomech (Bristol). 2013 Jul;28(6):697-704. doi: 10.1016/j.clinbiomech.2013.06.003. Epub 2013 Jul 2. Clin Biomech (Bristol). 2013. PMID: 23830138 Free PMC article. Clinical Trial.
-
Contributions of the individual ankle plantar flexors to support, forward progression and swing initiation during walking.J Biomech. 2001 Nov;34(11):1387-98. doi: 10.1016/s0021-9290(01)00105-1. J Biomech. 2001. PMID: 11672713
-
Contributions to the understanding of gait control.Dan Med J. 2014 Apr;61(4):B4823. Dan Med J. 2014. PMID: 24814597 Review.
-
Biomechanics and muscle coordination of human walking: part II: lessons from dynamical simulations and clinical implications.Gait Posture. 2003 Feb;17(1):1-17. doi: 10.1016/s0966-6362(02)00069-3. Gait Posture. 2003. PMID: 12535721 Review.
Cited by
-
Spinal maps of motoneuron activity during human locomotion: neuromechanical considerations.Front Physiol. 2024 Jul 23;15:1389436. doi: 10.3389/fphys.2024.1389436. eCollection 2024. Front Physiol. 2024. PMID: 39108539 Free PMC article. Review.
-
Force encoding in stick insect legs delineates a reference frame for motor control.J Neurophysiol. 2012 Sep;108(5):1453-72. doi: 10.1152/jn.00274.2012. Epub 2012 Jun 6. J Neurophysiol. 2012. PMID: 22673329 Free PMC article.
-
The Effects of Selective Muscle Weakness on Muscle Coordination in the Human Arm.Appl Bionics Biomech. 2018 Sep 19;2018:5637568. doi: 10.1155/2018/5637568. eCollection 2018. Appl Bionics Biomech. 2018. PMID: 30402139 Free PMC article.
-
The mechanics and energetics of human walking and running: a joint level perspective.J R Soc Interface. 2012 Jan 7;9(66):110-8. doi: 10.1098/rsif.2011.0182. Epub 2011 May 25. J R Soc Interface. 2012. PMID: 21613286 Free PMC article.
-
Evaluation of Spatiotemporal Patterns of the Spinal Muscle Coordination Output during Walking in the Exoskeleton.Sensors (Basel). 2022 Jul 30;22(15):5708. doi: 10.3390/s22155708. Sensors (Basel). 2022. PMID: 35957264 Free PMC article.
References
-
- Anderson FC, Pandy MG. Individual muscle contributions to support in normal walking. Gait Posture. 2003;17(2):159–69. - PubMed
-
- Cappellini G, Ivanenko YP, Poppele RE, Lacquaniti F. Motor patterns in human walking and running. J Neurophysiol. 2006;95(6):3426–37. - PubMed
-
- Clark DJ, Neptune RR, Zajac FE, Ting LH, Kautz SA. Modular organization of muscle activity underlying locomotor control complexity and recovery following stroke. Journal of Neuroscience. 2008 in review.
-
- d'Avella A, Saltiel P, Bizzi E. Combinations of muscle synergies in the construction of a natural motor behavior. Nat Neurosci. 2003;6(3):300–8. - PubMed
-
- Goffe WL, Ferrier GD, Rogers J. Global optimization of statistical functions with simulated annealing. J Econometrics. 1994;60(12):65–99.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
