

The mechanics of slithering locomotion
- PMID: 19506255
- PMCID: PMC2700932
- DOI: 10.1073/pnas.0812533106
The mechanics of slithering locomotion
Abstract
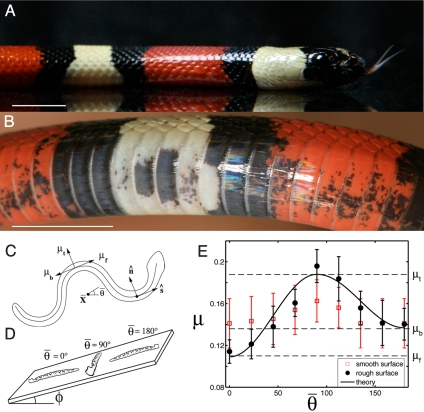
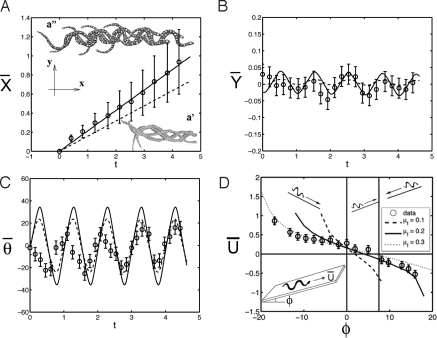
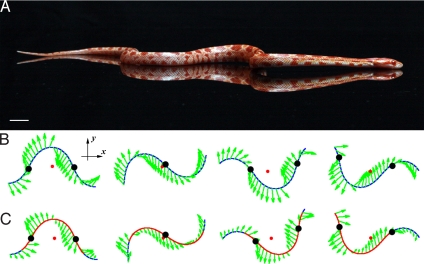
In this experimental and theoretical study, we investigate the slithering of snakes on flat surfaces. Previous studies of slithering have rested on the assumption that snakes slither by pushing laterally against rocks and branches. In this study, we develop a theoretical model for slithering locomotion by observing snake motion kinematics and experimentally measuring the friction coefficients of snakeskin. Our predictions of body speed show good agreement with observations, demonstrating that snake propulsion on flat ground, and possibly in general, relies critically on the frictional anisotropy of their scales. We have also highlighted the importance of weight distribution in lateral undulation, previously difficult to visualize and hence assumed uniform. The ability to redistribute weight, clearly of importance when appendages are airborne in limbed locomotion, has a much broader generality, as shown by its role in improving limbless locomotion.
Conflict of interest statement
The authors declare no conflict of interest.
Figures
References
-
- Walton M, Jayne BC, Bennett AF. The energetic cost of limbless locomotion. Science. 1990;249:524–527. - PubMed
-
- Cundall D. Functional morphology in Snakes: Ecology and Evolutionary Biology. In: Siegel RA, Collins JT, Novak SS, editors. Caldwell, NJ: Blackburn; 1987. pp. 106–140.
-
- Bellairs A. Life of Reptiles. Vol 2. New York: Universe Books; 1970. pp. 283–331.
-
- Trueman ER. The Locomotion of Soft-Bodied Animals. London: Edward Arnold; 1975.
-
- Chan B, Balmforth NJ, Hosoi AE. Building a better snail: Lubrication and adhesive locomotion. Phys Fluids. 2005;17:113101.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
