

Regenerative patterning in Swarm Robots: mutual benefits of research in robotics and stem cell biology
- PMID: 19557691
- PMCID: PMC2874133
- DOI: 10.1387/ijdb.092937mr
Regenerative patterning in Swarm Robots: mutual benefits of research in robotics and stem cell biology
Abstract
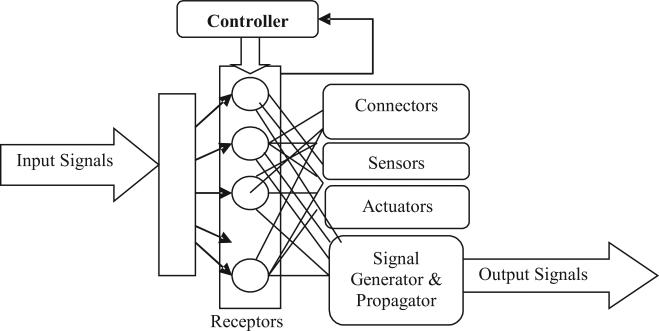
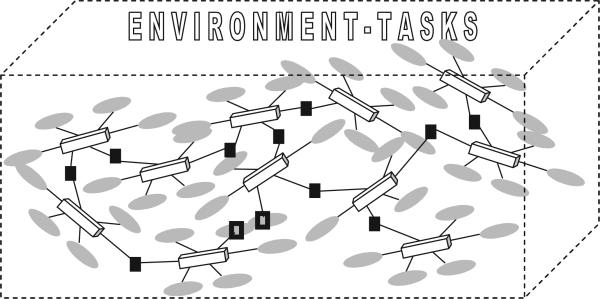
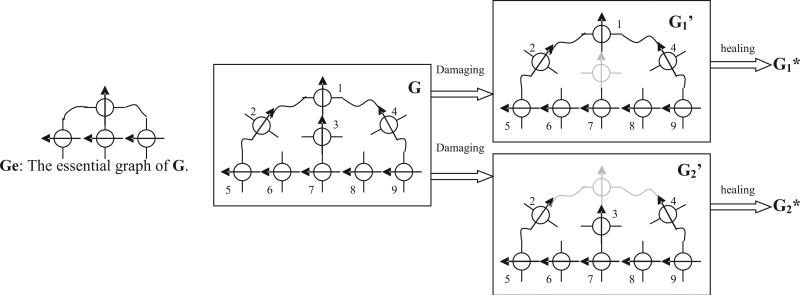
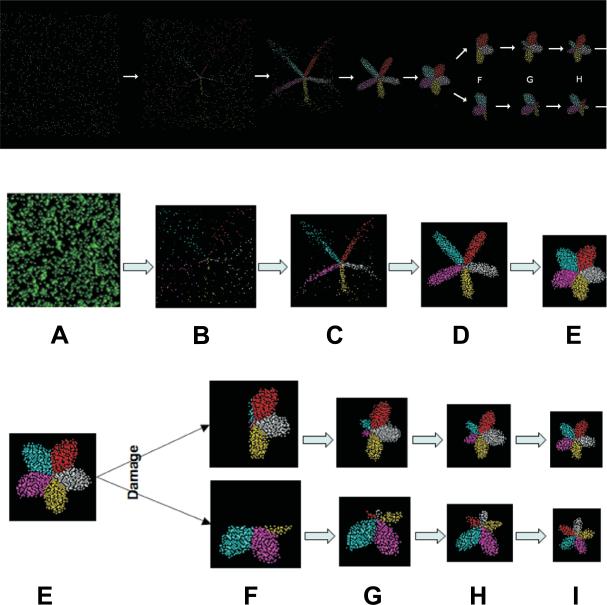
This paper presents a novel perspective of Robotic Stem Cells (RSCs), defined as the basic non-biological elements with stem cell like properties that can self-reorganize to repair damage to their swarming organization. Self here means that the elements can autonomously decide and execute their actions without requiring any preset triggers, commands, or help from external sources. We develop this concept for two purposes. One is to develop a new theory for self-organization and self-assembly of multi-robots systems that can detect and recover from unforeseen errors or attacks. This self-healing and self-regeneration is used to minimize the compromise of overall function for the robot team. The other is to decipher the basic algorithms of regenerative behaviors in multi-cellular animal models, so that we can understand the fundamental principles used in the regeneration of biological systems. RSCs are envisioned to be basic building elements for future systems that are capable of self-organization, self-assembly, self-healing and self-regeneration. We first discuss the essential features of biological stem cells for such a purpose, and then propose the functional requirements of robotic stem cells with properties equivalent to gene controller, program selector and executor. We show that RSCs are a novel robotic model for scalable self-organization and self-healing in computer simulations and physical implementation. As our understanding of stem cells advances, we expect that future robots will be more versatile, resilient and complex, and such new robotic systems may also demand and inspire new knowledge from stem cell biology and related fields, such as artificial intelligence and tissue engineering.
Figures



Comment in
-
Pattern formation today.Int J Dev Biol. 2009;53(5-6):653-8. doi: 10.1387/ijdb.082594cc. Int J Dev Biol. 2009. PMID: 19557673 Free PMC article. Review.
References
-
- AGATA K, SAITO Y, NAKAJIMA E. Unifying principles of regeneration I: Epimorphosis versus morphallaxis. Dev. Growth Differ. 2007;49:73–78. - PubMed
-
- ARBIB MA. Towards a Theoretical Biology. Edinburgh University Press; 1969. Self-reproducing automata: some implications for theoretical biology.
-
- BODE HR. Head regeneration in Hydra. Dev. Dynamics. 2003;226:225–36. - PubMed
-
- BONGARD J, ZYKOV V, LIPSON H. Resilient machines through continuous self-modeling. Science. 2006;314:1118–1121. - PubMed
-
- BORG I. Modern Multidimensional Scaling: Theory and Applications. Springer Series in Statistics. 2005:3–59.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
