

Robust passive dynamics of the musculoskeletal system compensate for unexpected surface changes during human hopping
- PMID: 19589956
- PMCID: PMC2755999
- DOI: 10.1152/japplphysiol.91189.2008
Robust passive dynamics of the musculoskeletal system compensate for unexpected surface changes during human hopping
Abstract
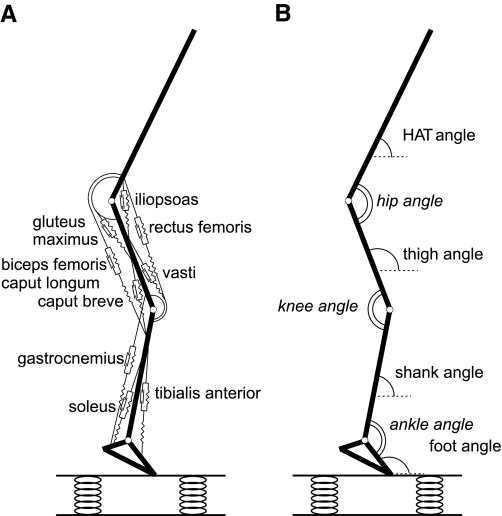
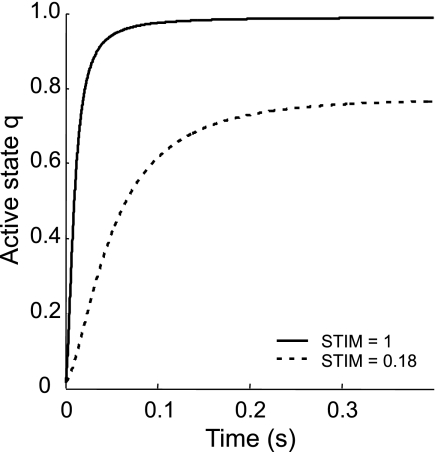
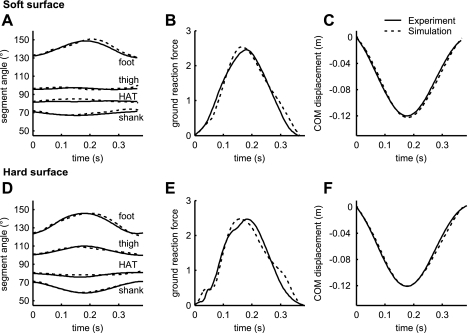
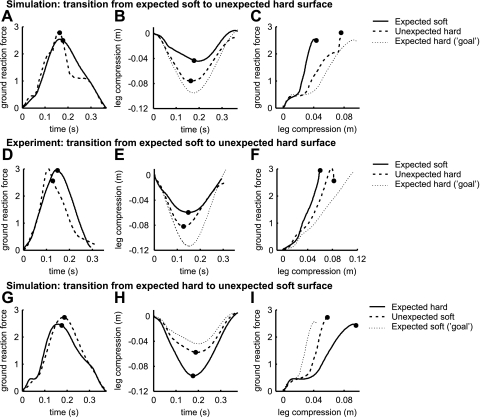
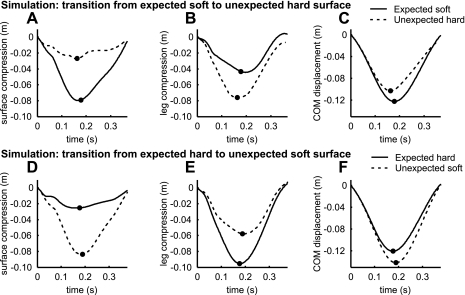
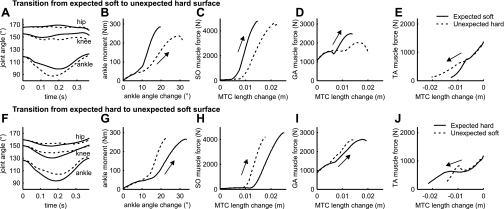
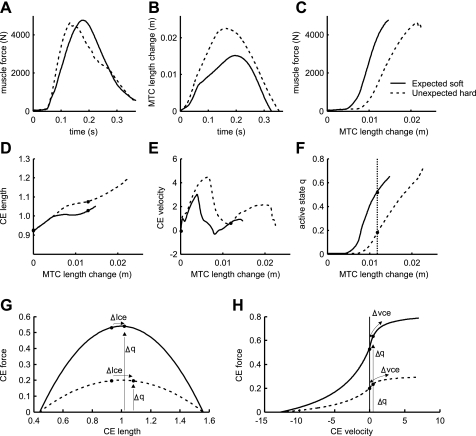
When human hoppers are surprised by a change in surface stiffness, they adapt almost instantly by changing leg stiffness, implying that neural feedback is not necessary. The goal of this simulation study was first to investigate whether leg stiffness can change without neural control adjustment when landing on an unexpected hard or unexpected compliant (soft) surface, and second to determine what underlying mechanisms are responsible for this change in leg stiffness. The muscle stimulation pattern of a forward dynamic musculoskeletal model was optimized to make the model match experimental hopping kinematics on hard and soft surfaces. Next, only surface stiffness was changed to determine how the mechanical interaction of the musculoskeletal model with the unexpected surface affected leg stiffness. It was found that leg stiffness adapted passively to both unexpected surfaces. On the unexpected hard surface, leg stiffness was lower than on the soft surface, resulting in close-to-normal center of mass displacement. This reduction in leg stiffness was a result of reduced joint stiffness caused by lower effective muscle stiffness. Faster flexion of the joints due to the interaction with the hard surface led to larger changes in muscle length, while the prescribed increase in active state and resulting muscle force remained nearly constant in time. Opposite effects were found on the unexpected soft surface, demonstrating the bidirectional stabilizing properties of passive dynamics. These passive adaptations to unexpected surfaces may be critical when negotiating disturbances during locomotion across variable terrain.
Figures
References
-
- Blickhan R The spring-mass model for running and hopping. J Biomech 22: 1217–1227, 1989. - PubMed
-
- Bobbert MF, Gerritsen KG, Litjens MC, Van Soest AJ. Why is countermovement jump height greater than squat jump height? Med Sci Sports Exerc 28: 1402–1412, 1996. - PubMed
-
- Brown IE, Loeb GE. A reductionist approach to creating and using neuromusculoskeletal models. In: Biomechanics and Neural Control of Posture and Movement, edited by Crago PE. New York: Springer-Verlag, 2000, p. 148–163.
-
- Casius LJR, Bobbert MF, Van Soest AJ. Forward dynamics of two-dimensional skeletal models. A Newton-Euler approach. J Appl Biomech 20: 421–449, 2004.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical