

Motion perception during variable-radius swing motion in darkness
- PMID: 19625542
- PMCID: PMC2775380
- DOI: 10.1152/jn.00116.2009
Motion perception during variable-radius swing motion in darkness
Abstract
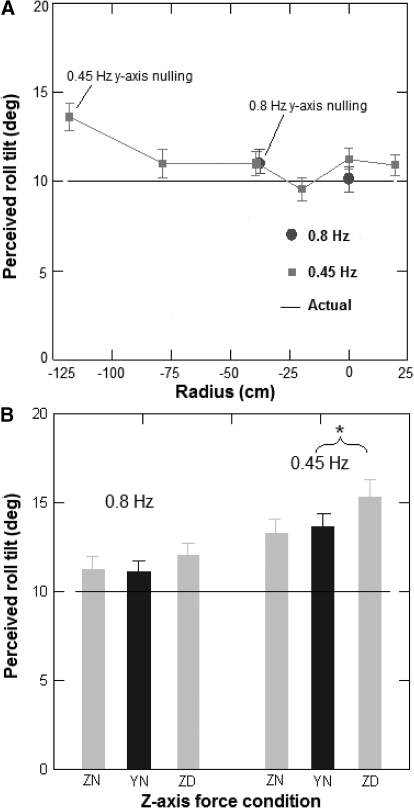
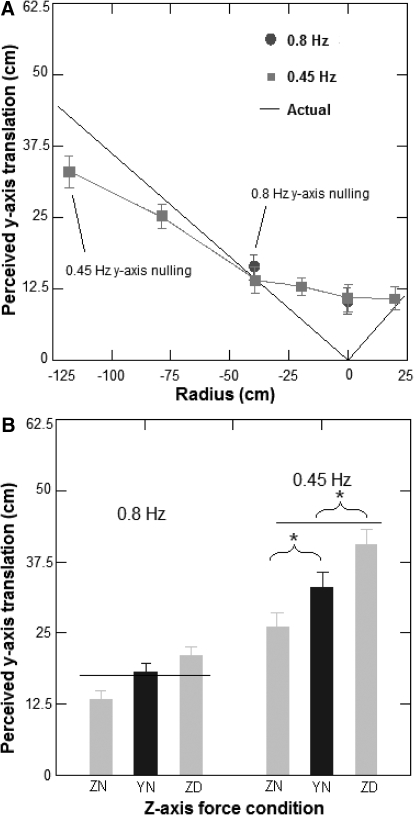
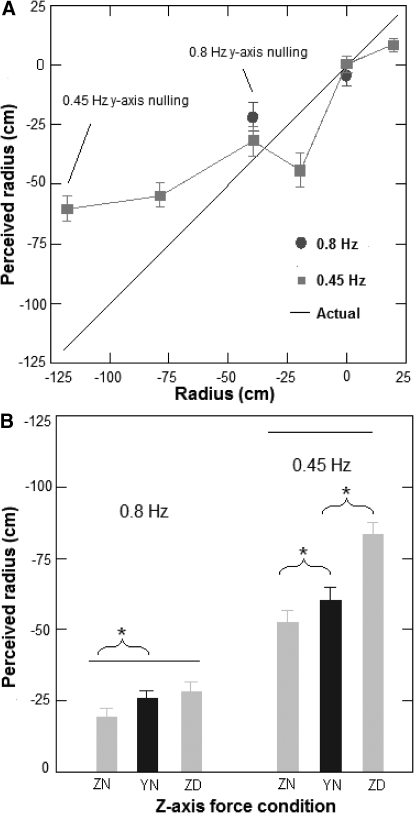
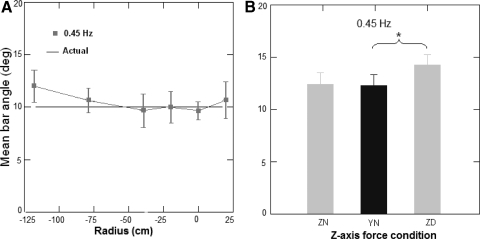
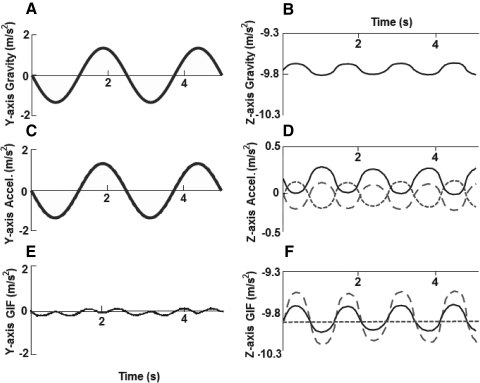
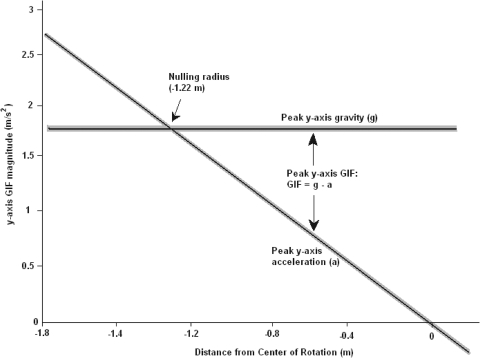
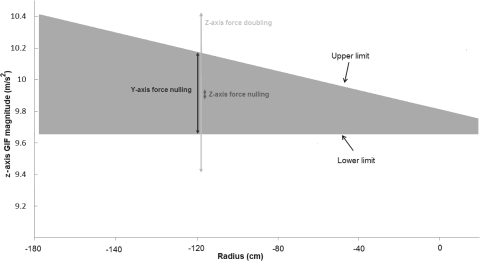
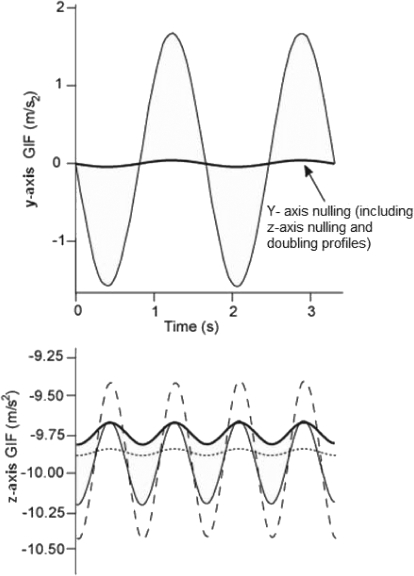
Using a variable-radius roll swing motion paradigm, we examined the influence of interaural (y-axis) and dorsoventral (z-axis) force modulation on perceived tilt and translation by measuring perception of horizontal translation, roll tilt, and distance from center of rotation (radius) at 0.45 and 0.8 Hz using standard magnitude estimation techniques (primarily verbal reports) in darkness. Results show that motion perception was significantly influenced by both y- and z-axis forces. During constant radius trials, subjects' perceptions of tilt and translation were generally almost veridical. By selectively pairing radius (1.22 and 0.38 m) and frequency (0.45 and 0.8 Hz, respectively), the y-axis acceleration could be tailored in opposition to gravity so that the combined y-axis gravitoinertial force (GIF) variation at the subject's ears was reduced to approximately 0.035 m/s(2) - in effect, the y-axis GIF was "nulled" below putative perceptual threshold levels. With y-axis force nulling, subjects overestimated their tilt angle and underestimated their horizontal translation and radius. For some y-axis nulling trials, a radial linear acceleration at twice the tilt frequency (0.25 m/s(2) at 0.9 Hz, 0.13 m/s(2) at 1.6 Hz) was simultaneously applied to reduce the z-axis force variations caused by centripetal acceleration and by changes in the z-axis component of gravity during tilt. For other trials, the phase of this radial linear acceleration was altered to double the magnitude of the z-axis force variations. z-axis force nulling further increased the perceived tilt angle and further decreased perceived horizontal translation and radius relative to the y-axis nulling trials, while z-axis force doubling had the opposite effect. Subject reports were remarkably geometrically consistent; an observer model-based analysis suggests that perception was influenced by knowledge of swing geometry.
Figures

Similar articles
-
Neural processing of gravito-inertial cues in humans. II. Influence of the semicircular canals during eccentric rotation.J Neurophysiol. 2001 Apr;85(4):1648-60. doi: 10.1152/jn.2001.85.4.1648. J Neurophysiol. 2001. PMID: 11287488
-
Spatial orientation and balance control changes induced by altered gravitoinertial force vectors.Exp Brain Res. 2001 Apr;137(3-4):397-410. doi: 10.1007/s002210000636. Exp Brain Res. 2001. PMID: 11355385 Clinical Trial.
-
Vestibular perception and action employ qualitatively different mechanisms. II. VOR and perceptual responses during combined Tilt&Translation.J Neurophysiol. 2005 Jul;94(1):199-205. doi: 10.1152/jn.00905.2004. Epub 2005 Feb 23. J Neurophysiol. 2005. PMID: 15730979
-
Neural processing of gravito-inertial cues in humans. IV. Influence of visual rotational cues during roll optokinetic stimuli.J Neurophysiol. 2003 Jan;89(1):390-400. doi: 10.1152/jn.00513.2001. J Neurophysiol. 2003. PMID: 12522188
-
Effects of motion paradigm on human perception of tilt and translation.Sci Rep. 2022 Jan 26;12(1):1430. doi: 10.1038/s41598-022-05483-6. Sci Rep. 2022. PMID: 35082357 Free PMC article.
Cited by
-
Perception of rotation, path, and heading in circular trajectories.Exp Brain Res. 2016 Aug;234(8):2323-37. doi: 10.1007/s00221-016-4638-0. Epub 2016 Apr 7. Exp Brain Res. 2016. PMID: 27056085 Free PMC article.
-
Humans gradually integrate sudden gain or loss of visual information into spatial orientation perception.Front Neurosci. 2024 Jan 8;17:1274949. doi: 10.3389/fnins.2023.1274949. eCollection 2023. Front Neurosci. 2024. PMID: 38260024 Free PMC article.
-
Human perceptual overestimation of whole body roll tilt in hypergravity.J Neurophysiol. 2015 Apr 1;113(7):2062-77. doi: 10.1152/jn.00095.2014. Epub 2014 Dec 24. J Neurophysiol. 2015. PMID: 25540216 Free PMC article.
-
Modeling human perception of orientation in altered gravity.Front Syst Neurosci. 2015 May 5;9:68. doi: 10.3389/fnsys.2015.00068. eCollection 2015. Front Syst Neurosci. 2015. PMID: 25999822 Free PMC article.
-
Perceived tilt and translation during variable-radius swing motion with congruent or conflicting visual and vestibular cues.Exp Brain Res. 2011 Apr;210(2):173-84. doi: 10.1007/s00221-011-2612-4. Epub 2011 Mar 19. Exp Brain Res. 2011. PMID: 21424258 Free PMC article.
References
-
- Barr CC, Schultheis LW, Robinson DA. Voluntary, non-visual control of the human vestibulo-ocular reflex. Acta Otolaryngol 81: 365–375, 1976 - PubMed
-
- Benson AJ, Hutt CB, Brown SF. Thresholds for the perception of whole body angular movement about a vertical axis. Aviat Space Environ Med 60: 1989 - PubMed
-
- Benson AJ, Spencer AB, Stott JR. Thresholds for the detection of the direction of whole-body, linear movement. Aviat Space Environ Med 51: 1986 - PubMed
-
- Borah J, Young L, Curry R. Optimal estimator for human spatial orientation. IEEE Trans Man Syst Cybern 545: 800–805, 1979 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources