

Forward locomotion of the nematode C. elegans is achieved through modulation of a single gait
- PMID: 19639043
- PMCID: PMC2714959
- DOI: 10.2976/1.3082260
Forward locomotion of the nematode C. elegans is achieved through modulation of a single gait
Abstract
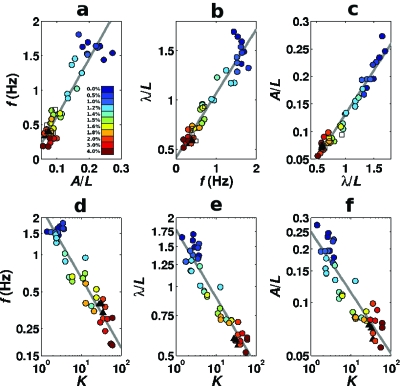
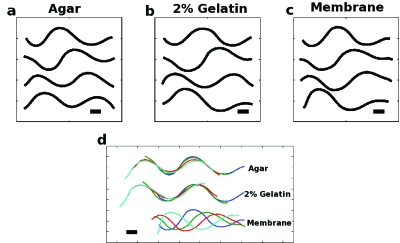
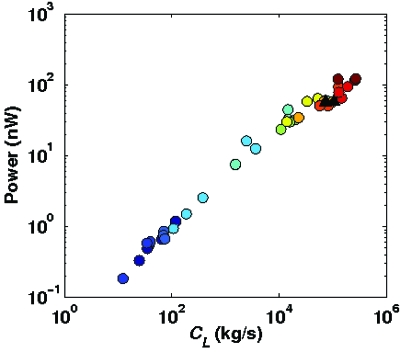
The ability of an animal to locomote through its environment depends crucially on the interplay between its active endogenous control and the physics of its interactions with the environment. The nematode worm Caenorhabditis elegans serves as an ideal model system for studying the respective roles of neural control and biomechanics, as well as the interaction between them. With only 302 neurons in a hard-wired neural circuit, the worm's apparent anatomical simplicity belies its behavioural complexity. Indeed, C. elegans exhibits a rich repertoire of complex behaviors, the majority of which are mediated by its adaptive undulatory locomotion. The conventional wisdom is that two kinematically distinct C. elegans locomotion behaviors-swimming in liquids and crawling on dense gel-like media-correspond to distinct locomotory gaits. Here we analyze the worm's motion through a series of different media and reveal a smooth transition from swimming to crawling, marked by a linear relationship between key locomotion metrics. These results point to a single locomotory gait, governed by the same underlying control mechanism. We further show that environmental forces play only a small role in determining the shape of the worm, placing conditions on the minimal pattern of internal forces driving locomotion.
Figures
References
-
- Alexander, R M (1989). “Optimization and gaits in the locomotion of vertebrates.” Physiol. Rev. 69, 1199–1227. - PubMed
-
- Alexander, R M (2002). “Locomotion.” In The Biology of Nematodes, Lee D L, ed., pp. 345–352, Taylor and Francis.
-
- Baek, J H, Cosman, P, Feng, Z, Silver, J, and Schafer, W R (2002). “Using machine vision to analyse and classify Caenorhabditis elegans behavioural phenotypes quantitatively.” J. Neurosci. Methods 118, 9–21. - PubMed
-
- Boyle, J H, Bryden, J A, and Cohen, N (2008). “An integrated neuro-mechanical model of C. elegans forward locomotion.” In LNCS: Neural Information Processing, Part 1, Vol. 4984, Ishikawa, M, Doya, K, Miyamoto, H, and Yamakawa, T, eds., pp. 37–47, Springer, Berlin.
-
- Boyle, J H, and Cohen, N (2008). “C. elegans body wall muscles are simple actuators.” BioSystems 94, 170–181. - PubMed
LinkOut - more resources
Full Text Sources