

Structure learning in action
- PMID: 19720086
- PMCID: PMC2778795
- DOI: 10.1016/j.bbr.2009.08.031
Structure learning in action
Abstract
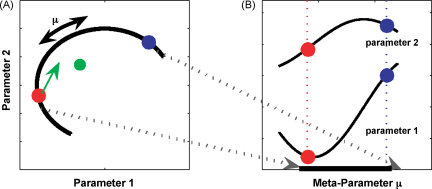
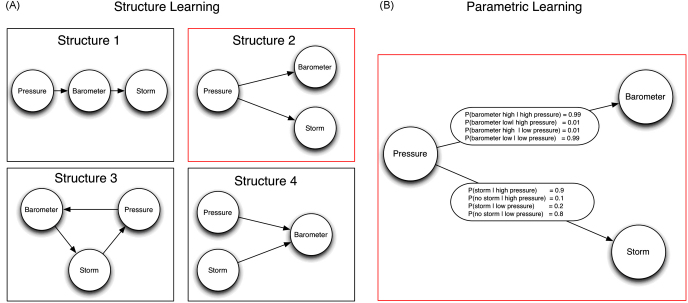
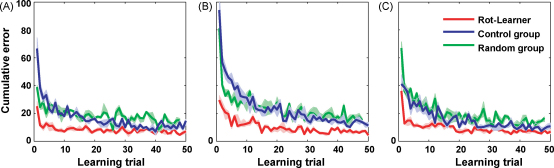
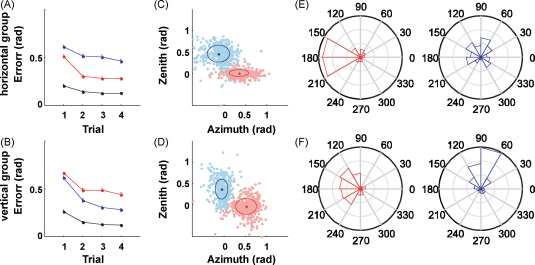
'Learning to learn' phenomena have been widely investigated in cognition, perception and more recently also in action. During concept learning tasks, for example, it has been suggested that characteristic features are abstracted from a set of examples with the consequence that learning of similar tasks is facilitated-a process termed 'learning to learn'. From a computational point of view such an extraction of invariants can be regarded as learning of an underlying structure. Here we review the evidence for structure learning as a 'learning to learn' mechanism, especially in sensorimotor control where the motor system has to adapt to variable environments. We review studies demonstrating that common features of variable environments are extracted during sensorimotor learning and exploited for efficient adaptation in novel tasks. We conclude that structure learning plays a fundamental role in skill learning and may underlie the unsurpassed flexibility and adaptability of the motor system.
Figures
References
-
- Ashby W.R. 2nd ed. Chapman & Hall; London: 1960. Design for a brain: the origin of adaptive behavior.
-
- Pearl J. Morgan Kaufmann Publishers; San Mateo, CA: 1988. Probabilistic reasoning in intelligent systems: networks of plausible inference.
-
- Boyen X., Friedman N., Koller D. Proceedings of the 15th annual conference on uncertainty in artificial intelligence (UAI-99) Morgan Kaufmann; 1999. Discovering the hidden structure of complex dynamic systems; pp. 91–100.
-
- Åström K.J., Wittenmark B. 2nd ed. Addison-Wesley; Reading, MA: 1995. Adaptive control.
-
- Friedman N. Proceedings of the 14th annual conference on uncertainty in artificial intelligence (UAI-98) Morgan Kaufmann; 1998. The Bayesian structural EM algorithm; pp. 129–139.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
