

Real-time model based electrical powered wheelchair control
- PMID: 19733494
- PMCID: PMC2811532
- DOI: 10.1016/j.medengphy.2009.08.002
Real-time model based electrical powered wheelchair control
Abstract
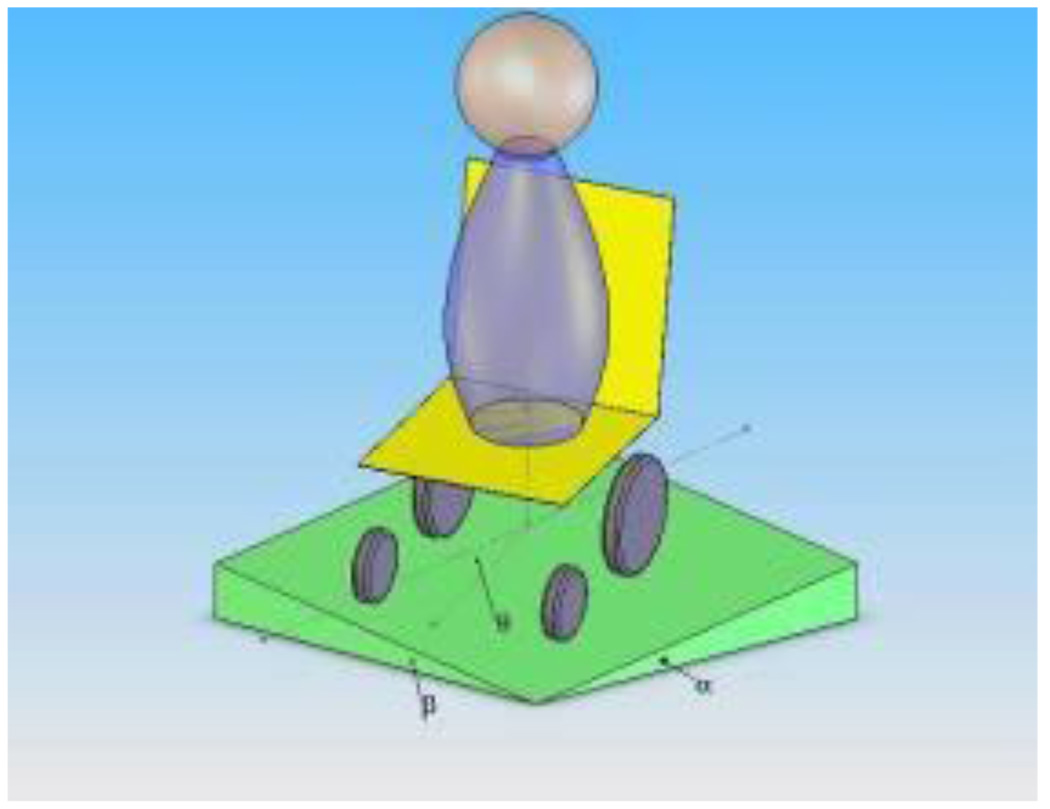
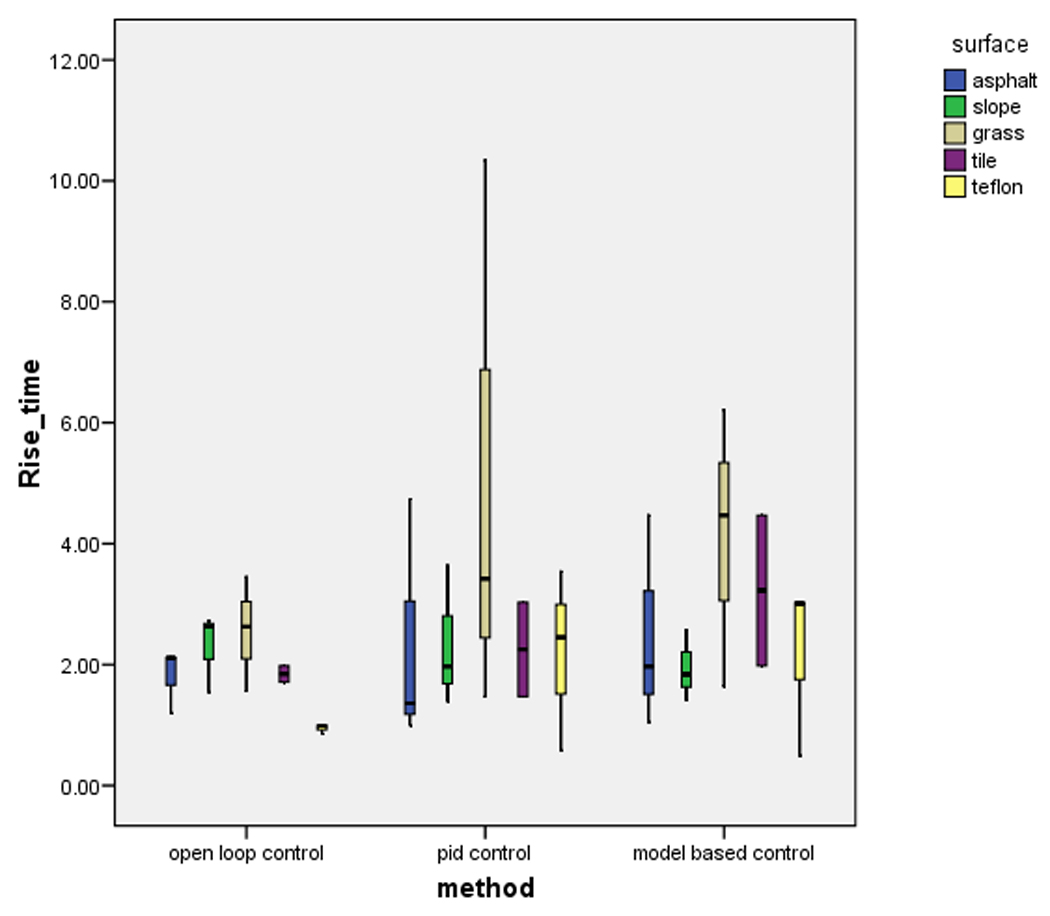
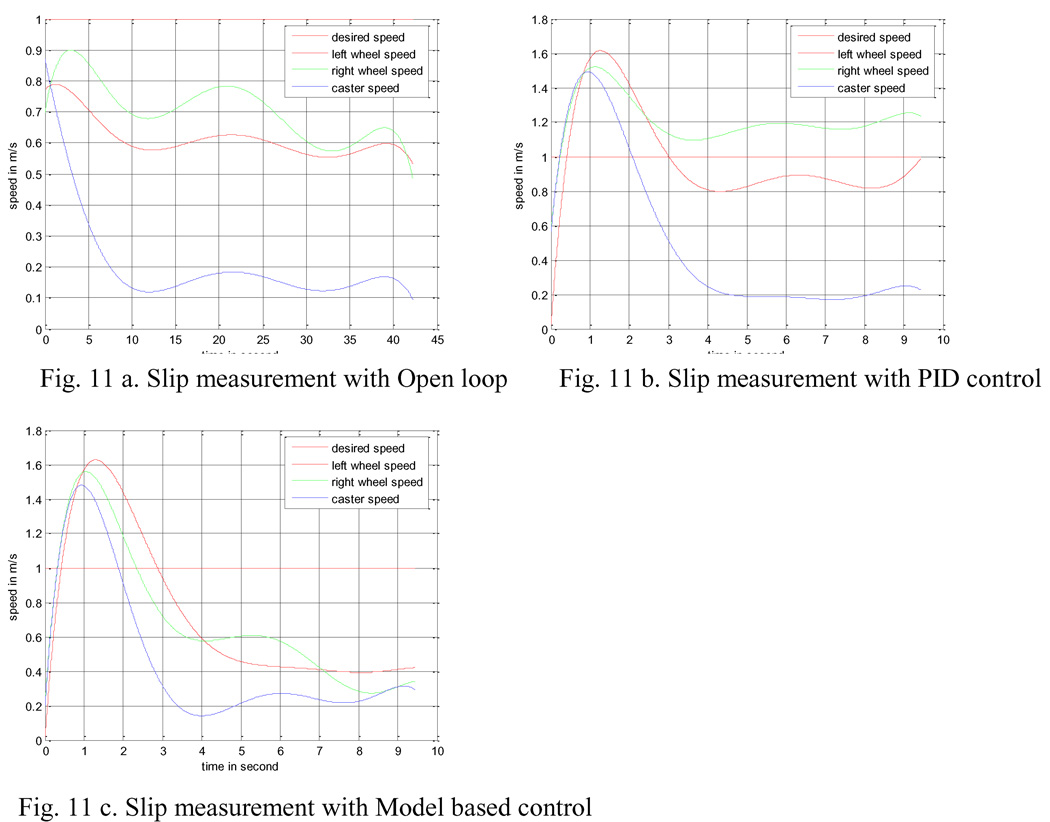
The purpose of this study was to evaluate the effects of three different control methods on driving speed variation and wheel slip of an electric-powered wheelchair (EPW). A kinematic model as well as 3D dynamic model was developed to control the velocity and traction of the wheelchair. A smart wheelchair platform was designed and built with a computerized controller and encoders to record wheel speeds and to detect the slip. A model based, a proportional-integral-derivative (PID) and an open-loop controller were applied with the EPW driving on four different surfaces at three specified speeds. The speed errors, variation, rise time, settling time and slip coefficient were calculated and compared for a speed step-response input. Experimental results showed that model based control performed best on all surfaces across the speeds.
Figures
















References
-
- Cooper RA, Cooper R, Boninger ML. Trends and issues in wheelchair and seating technologies. Assistive Technology. 2008;Vol. 20(No 2):61–72. - PubMed
-
- Cooper RA, Boninger ML, Spaeth DM, Ding D, Guo SF, Koontz AM, Fitzgerald SG, Cooper R, Kelleher A, Collins DM. Engineering Better Wheelchairs to Enhance Community Participation. IEEE Transactions on Neural Systems and Rehabilitation Engineering. 2006;Vol. 14(No 4):438–455. - PubMed
-
- Ummat S, Kirby RL. Nonfatal wheelchair-related accidents reported to the national electronic injury surveillance system. Am. J. of Phys. Med. and Rehabil. 1994;73:163–167. - PubMed
-
- Cooper RA. Engineering manual and electric powered wheelchairs. Critical Reviews in Biomedical Engineering. 1999;27(12):27–73. - PubMed
-
- Ding D, Cooper RA. Review of Control Technology and Algorithms for Electric Powered Wheelchairs. IEEE Controls Systems Magazine. 2005;Vol. 25(No 2):22–34.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
