

Feasible stability region in the frontal plane during human gait
- PMID: 19760504
- PMCID: PMC2893223
- DOI: 10.1007/s10439-009-9798-7
Feasible stability region in the frontal plane during human gait
Abstract
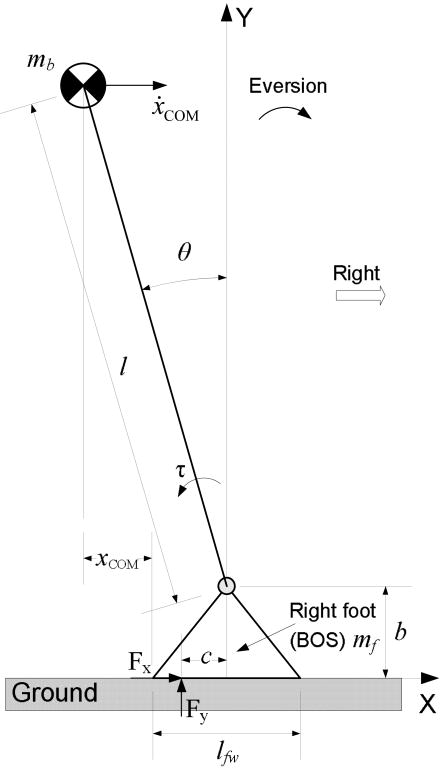
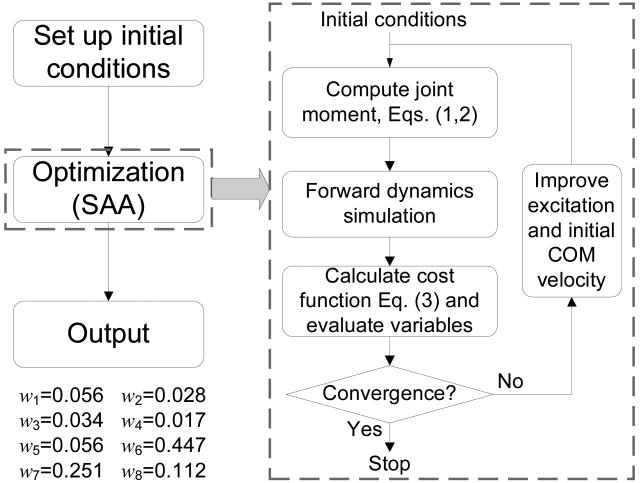
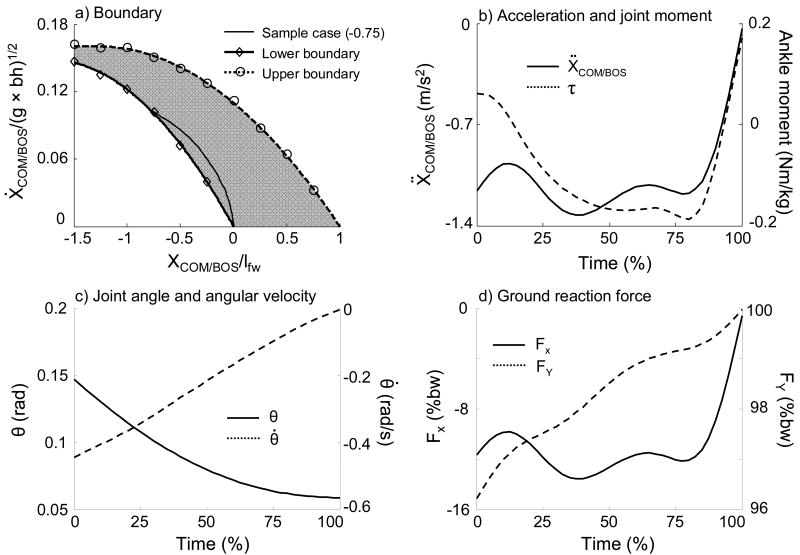
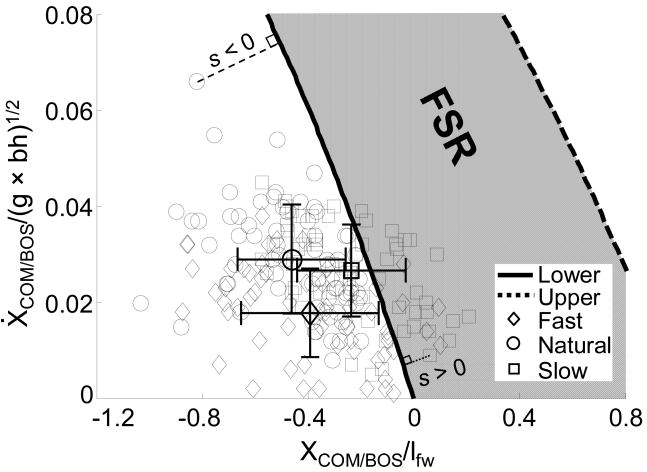
The inability to adequately control the motion of the center of mass (COM) in the frontal plane may result in a loss of balance causing a sideways fall during human gait. The primary purposes of this study were (1) to derive the feasible stability region (FSR) in the mediolateral direction, and (2) to compare the FSR with the COM motion state taken from 193 trials among 39 young subjects at liftoff during walking at different speeds. The lower boundary of the FSR was derived, at a given initial COM location, as the minimum rightward COM velocity, at liftoff of the left foot, required to bring the COM into the base of support (BOS), i.e., the right (stance) foot, as the COM velocity diminishes. The upper boundary was derived as the maximum rightward COM velocity, beyond which the left foot must land to the right of the right foot (BOS) in order to prevent a fall. We established a 2-link human model and employed dynamic optimization to estimate these threshold values for velocity. For a range of initial COM positions, simulated annealing algorithm was used to search for the threshold velocity values. Our study quantified the extent to which mediolateral balance can still be maintained without resorting to a crossover step (the left foot lands to the right of the BOS) for balance recovery. The derived FSR is in good agreement with our gait experimental results.
Figures
References
-
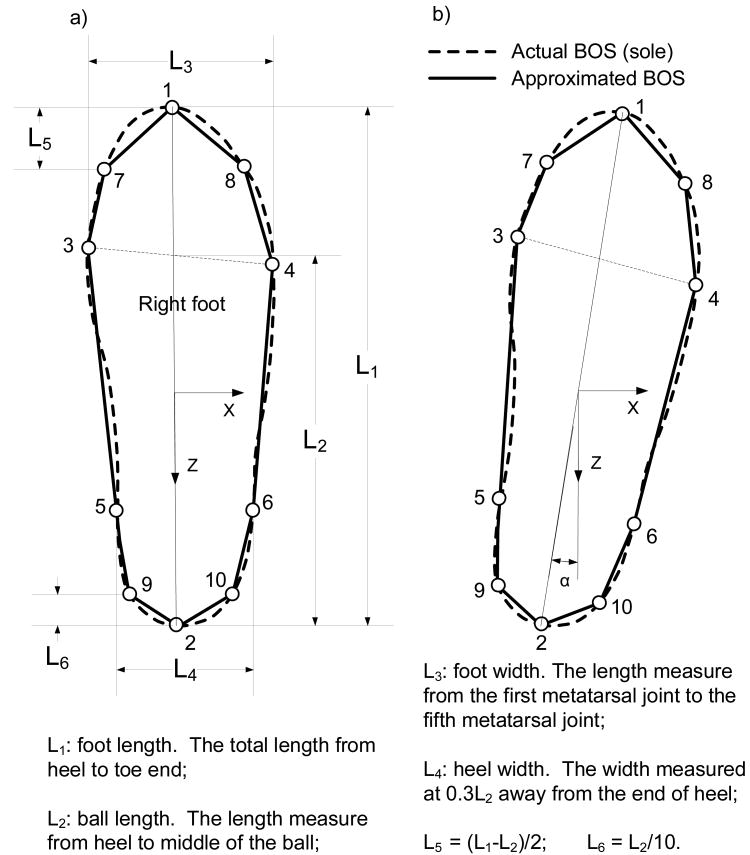
- Agie A, Nikolie V, Mijovie B. Foot anthropometry and morphology phenomena Coll. Antropol. 2006;30:815–821. - PubMed
-
- Anderson FC. PhD dissertation. University of Texas at Austin; Austin, Texas: 1999. A dynamic optimization solution for a complete cycle of normal gait: An analysis of muscle function and joint contact force.
-
- Barak Y, Wagenaar RC, Holt KG. Gait characteristics of elderly people with a history of falls: A dynamic Approach. Phys Ther. 2006;86:1501–1510. - PubMed
-
- Beauchet O, Allali G, Berrut G, Dubost V. Is low lower-limb kinematic variability always an index of stability? Gait Posture. 2007;26:327–328. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
