

doi: 10.2478/v10078-008-0001-2.
Evolution of Motor Control: From Reflexes and Motor Programs to the Equilibrium-Point Hypothesis
Affiliations
- PMID: 19823595
- PMCID: PMC2759721
- DOI: 10.2478/v10078-008-0001-2
Item in Clipboard
Evolution of Motor Control: From Reflexes and Motor Programs to the Equilibrium-Point Hypothesis
J Hum Kinet.
.
Abstract
This brief review analyzes the evolution of motor control theories along two lines that emphasize active (motor programs) and reactive (reflexes) features of voluntary movements. It suggests that the only contemporary hypothesis that integrates both approaches in a fruitful way is the equilibrium-point hypothesis. Physical, physiological, and behavioral foundations of the EP-hypothesis are considered as well as relations between the EP-hypothesis and the recent developments of the notion of motor synergies. The paper ends with a brief review of the criticisms of the EP-hypothesis and challenges that the hypothesis faces at this time.
Figures

An illustration of single-muscle control within the EP-hypothesis. A: A central command (λ) defines a force-length characteristic. Given an external load (L), only one equilibrium point is possible (EP1). Any deviations (filled points) from EP1 will result in motion back to EP1. B: To perform an active movement, a change in λ is required (λ1 to λ2). As a result, a new equilibrium point (EP2) is established, and a motion to EP2 happens. C: Movements can occur passively, as a result of a change in the load (L1 to L2).
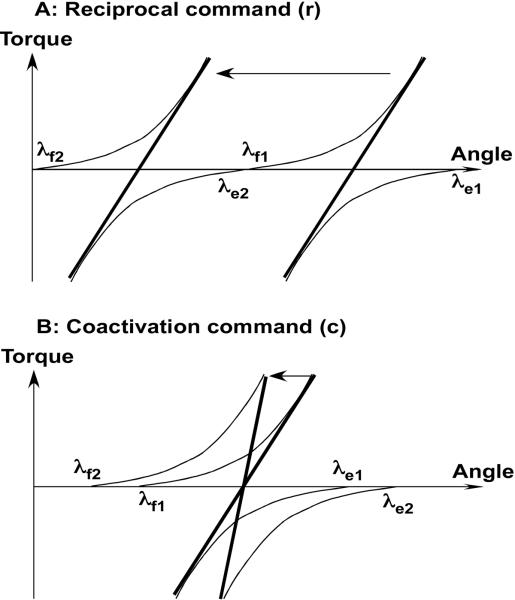
Control of a joint may be described with two variables, λf and λe on the torque-angle plane. The joint torque-angle haracteristic (thick lines) will represent the algebraic sum of the corresponding muscle characteristics. A: Shifts of both λf and λe in the same direction result in a shift of the joint characteristic parallel to the angle axis and may be associated with a reciprocal command (r). Shifts of λf and λe in opposite directions lead to a change in the slope of the joint characteristic and may be associated with a coactivation command (c).
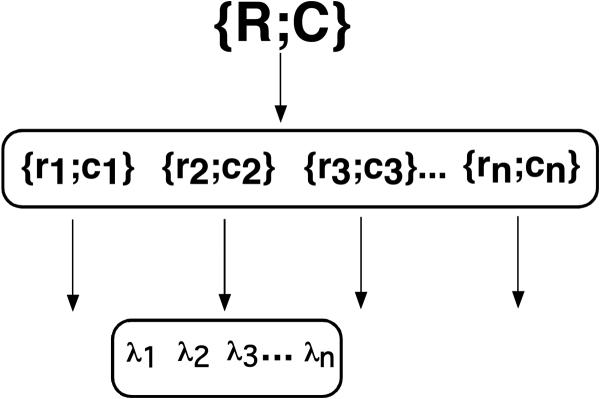
An illustration of a hypothetical hierarchy for a multi-joint movement. A command for a desired motion of a particular point on the body (for example, the endpoint of a multi-joint limb) may be associated with a command {R,C}. It forms an input into a synergy using {r,c} commands to individual joints as elemental variables. Each {r,c} pair is the input into a multi-muscle synergy with λs as elemental variables.
Similar articles
-
The timing of control signals underlying fast point-to-point arm movements.Exp Brain Res. 2001 Apr;137(3-4):411-23. doi: 10.1007/s002210000643. Exp Brain Res. 2001. PMID: 11355386 Clinical Trial.
-
Motor synergies and the equilibrium-point hypothesis.Motor Control. 2010 Jul;14(3):294-322. doi: 10.1123/mcj.14.3.294. Motor Control. 2010. PMID: 20702893 Free PMC article. Review.
-
Pilot study on quantitative assessment of muscle imbalance: differences of muscle synergies, equilibrium-point trajectories, and endpoint stiffness in normal and pathological upper-limb movements.Annu Int Conf IEEE Eng Med Biol Soc. 2014;2014:5784-7. doi: 10.1109/EMBC.2014.6944942. Annu Int Conf IEEE Eng Med Biol Soc. 2014. PMID: 25571310
-
Retaining the equilibrium point hypothesis as an abstract description of the neuromuscular system.Motor Control. 1999 Jan;3(1):67-89. doi: 10.1123/mcj.3.1.67. Motor Control. 1999. PMID: 10075509
-
Motor control theories and their applications.Medicina (Kaunas). 2010;46(6):382-92. Medicina (Kaunas). 2010. PMID: 20944446 Free PMC article. Review.
Cited by
-
Computational evidence for nonlinear feedforward modulation of fusimotor drive to antagonistic co-contracting muscles.Sci Rep. 2020 Jun 30;10(1):10625. doi: 10.1038/s41598-020-67403-w. Sci Rep. 2020. PMID: 32606297 Free PMC article.
-
From spontaneous motor activity to coordinated behaviour: a developmental model.PLoS Comput Biol. 2014 Jul 24;10(7):e1003653. doi: 10.1371/journal.pcbi.1003653. eCollection 2014 Jul. PLoS Comput Biol. 2014. PMID: 25057775 Free PMC article.
-
Error Detection is Critical for Visual-Motor Corrections.Motor Control. 2016 Apr;20(2):187-94. doi: 10.1123/mc.2015-0022. Epub 2015 Aug 27. Motor Control. 2016. PMID: 26314090 Free PMC article.
-
Tutorial Review of Bio-Inspired Approaches to Robotic Manipulation for Space Debris Salvage.Biomimetics (Basel). 2020 May 12;5(2):19. doi: 10.3390/biomimetics5020019. Biomimetics (Basel). 2020. PMID: 32408615 Free PMC article. Review.
-
Humans self-organise balance control strategies on a dynamic platform.Sci Rep. 2025 Jul 8;15(1):24366. doi: 10.1038/s41598-025-09127-3. Sci Rep. 2025. PMID: 40628838 Free PMC article.
References
-
- Bernstein NA. The problem of interrelation between coordination and localization. Archives of Biological Science. 1935;38:1–35. in Russian.
-
- Bernstein NA. On the Construction of Movements. Medgiz; Moscow: 1947. in Russian.
-
- Bernstein NA. The Co-ordination and Regulation of Movements. Pergamon Press; Oxford: 1967.
-
- Bernstein NA. Contemporary Studies on the Physiology of the Neural Process. Smysl; Moscow, Russia: 2003.
-
- Bizzi E, Accornero N, Chapple W, Hogan N. Arm trajectory formation in monkeys. Experimental Brain Research. 1982;46:139–143. - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources