

Multi-subject/daily-life activity EMG-based control of mechanical hands
- PMID: 19919710
- PMCID: PMC2784470
- DOI: 10.1186/1743-0003-6-41
Multi-subject/daily-life activity EMG-based control of mechanical hands
Abstract
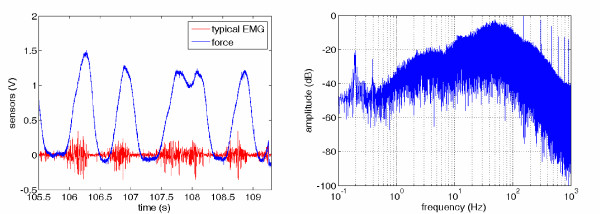
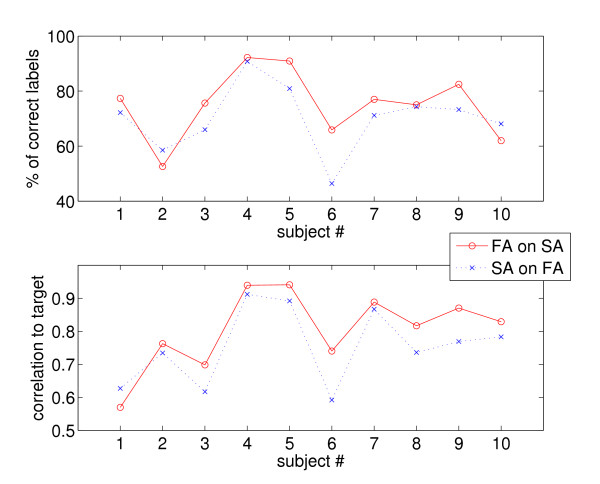
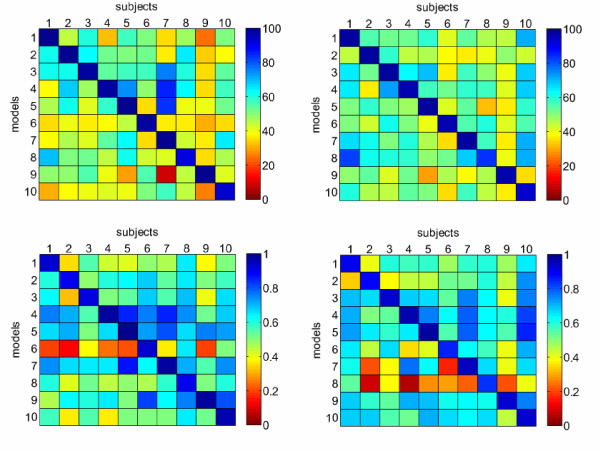
Background: Forearm surface electromyography (EMG) has been in use since the Sixties to feed-forward control active hand prostheses in a more and more refined way. Recent research shows that it can be used to control even a dexterous polyarticulate hand prosthesis such as Touch Bionics's i-LIMB, as well as a multifingered, multi-degree-of-freedom mechanical hand such as the DLR II. In this paper we extend previous work and investigate the robustness of such fine control possibilities, in two ways: firstly, we conduct an analysis on data obtained from 10 healthy subjects, trying to assess the general applicability of the technique; secondly, we compare the baseline controlled condition (arm relaxed and still on a table) with a "Daily-Life Activity" (DLA) condition in which subjects walk, raise their hands and arms, sit down and stand up, etc., as an experimental proxy of what a patient is supposed to do in real life. We also propose a cross-subject model analysis, i.e., training a model on a subject and testing it on another one. The use of pre-trained models could be useful in shortening the time required by the subject/patient to become proficient in using the hand.
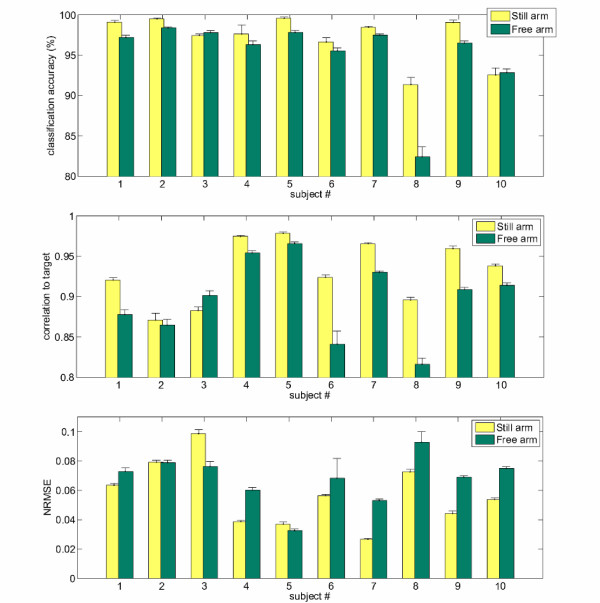
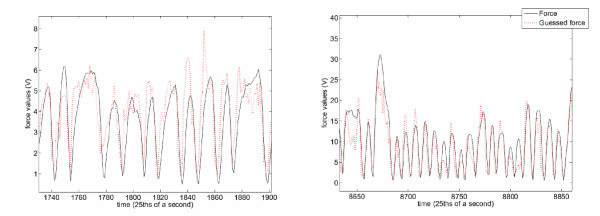
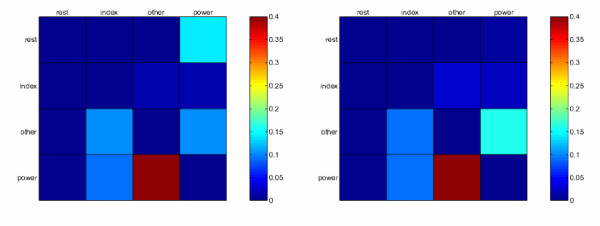
Results: A standard machine learning technique was able to achieve a real-time grip posture classification rate of about 97% in the baseline condition and 95% in the DLA condition; and an average correlation to the target of about 0.93 (0.90) while reconstructing the required force. Cross-subject analysis is encouraging although not definitive in its present state.
Conclusion: Performance figures obtained here are in the same order of magnitude of those obtained in previous work about healthy subjects in controlled conditions and/or amputees, which lets us claim that this technique can be used by reasonably any subject, and in DLA situations. Use of previously trained models is not fully assessed here, but more recent work indicates it is a promising way ahead.
Figures


Similar articles
-
Surface EMG in advanced hand prosthetics.Biol Cybern. 2009 Jan;100(1):35-47. doi: 10.1007/s00422-008-0278-1. Epub 2008 Nov 18. Biol Cybern. 2009. PMID: 19015872
-
Fine detection of grasp force and posture by amputees via surface electromyography.J Physiol Paris. 2009 Sep-Dec;103(3-5):255-62. doi: 10.1016/j.jphysparis.2009.08.008. Epub 2009 Aug 7. J Physiol Paris. 2009. PMID: 19665563
-
Online myoelectric control of a dexterous hand prosthesis by transradial amputees.IEEE Trans Neural Syst Rehabil Eng. 2011 Jun;19(3):260-70. doi: 10.1109/TNSRE.2011.2108667. Epub 2011 Jan 31. IEEE Trans Neural Syst Rehabil Eng. 2011. PMID: 21292599
-
Intuitive neuromyoelectric control of a dexterous bionic arm using a modified Kalman filter.J Neurosci Methods. 2020 Jan 15;330:108462. doi: 10.1016/j.jneumeth.2019.108462. Epub 2019 Nov 8. J Neurosci Methods. 2020. PMID: 31711883 Review.
-
Control of hand prostheses using peripheral information.IEEE Rev Biomed Eng. 2010;3:48-68. doi: 10.1109/RBME.2010.2085429. IEEE Rev Biomed Eng. 2010. PMID: 22275201 Review.
Cited by
-
Quantifying forearm muscle activity during wrist and finger movements by means of multi-channel electromyography.PLoS One. 2014 Oct 7;9(10):e109943. doi: 10.1371/journal.pone.0109943. eCollection 2014. PLoS One. 2014. PMID: 25289669 Free PMC article.
-
Role of Muscle Synergies in Real-Time Classification of Upper Limb Motions using Extreme Learning Machines.J Neuroeng Rehabil. 2016 Aug 15;13(1):76. doi: 10.1186/s12984-016-0183-0. J Neuroeng Rehabil. 2016. PMID: 27527511 Free PMC article.
-
An Adaptive Multi-Modal Control Strategy to Attenuate the Limb Position Effect in Myoelectric Pattern Recognition.Sensors (Basel). 2021 Nov 7;21(21):7404. doi: 10.3390/s21217404. Sensors (Basel). 2021. PMID: 34770709 Free PMC article.
-
Gesture Recognition Using Surface Electromyography and Deep Learning for Prostheses Hand: State-of-the-Art, Challenges, and Future.Front Neurosci. 2021 Apr 26;15:621885. doi: 10.3389/fnins.2021.621885. eCollection 2021. Front Neurosci. 2021. PMID: 33981195 Free PMC article. Review.
-
Improving the functionality, robustness, and adaptability of myoelectric control for dexterous motion restoration.Exp Brain Res. 2019 Feb;237(2):291-311. doi: 10.1007/s00221-018-5441-x. Epub 2018 Nov 30. Exp Brain Res. 2019. PMID: 30506366 Review.
References
-
- De Luca CJ. The use of surface electromyography in biomechanics. Journal of Applied Biomechanics. 1997;13(2):135–163.
-
- De Luca CJ. Surface Electromyography: Detection and Recording. 2002. [Copyright 2002 by DelSys, Inc.]
-
- Bottomley AH. Myoelectric control of powered prostheses. J Bone Joint Surg. 1965;B47:411–415. - PubMed
-
- Childress DA. A myoelectric three-state controller using rate sensitivity. Proceedings 8th ICMBE, Chicago, IL. 1969. pp. 4–5.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
