

Phase-linking and the perceived motion during off-vertical axis rotation
- PMID: 19937069
- PMCID: PMC2905236
- DOI: 10.1007/s00422-009-0347-0
Phase-linking and the perceived motion during off-vertical axis rotation
Abstract
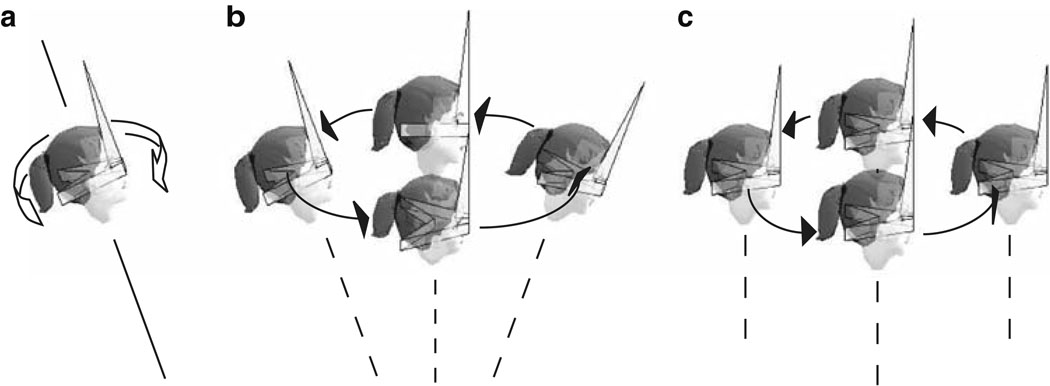
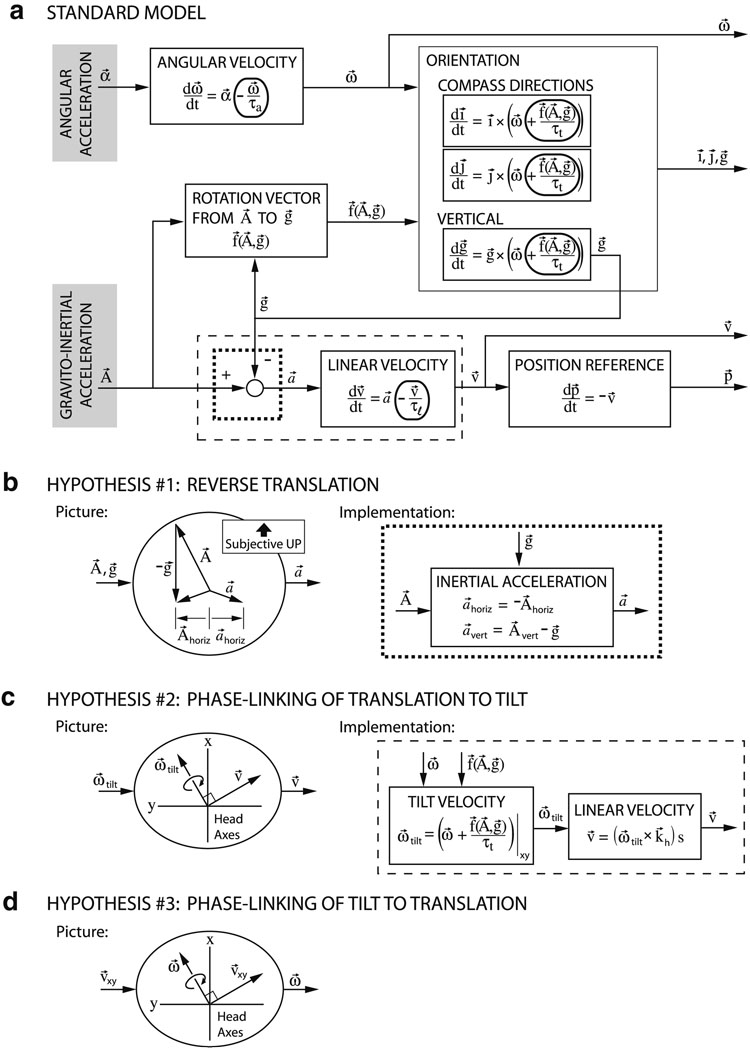
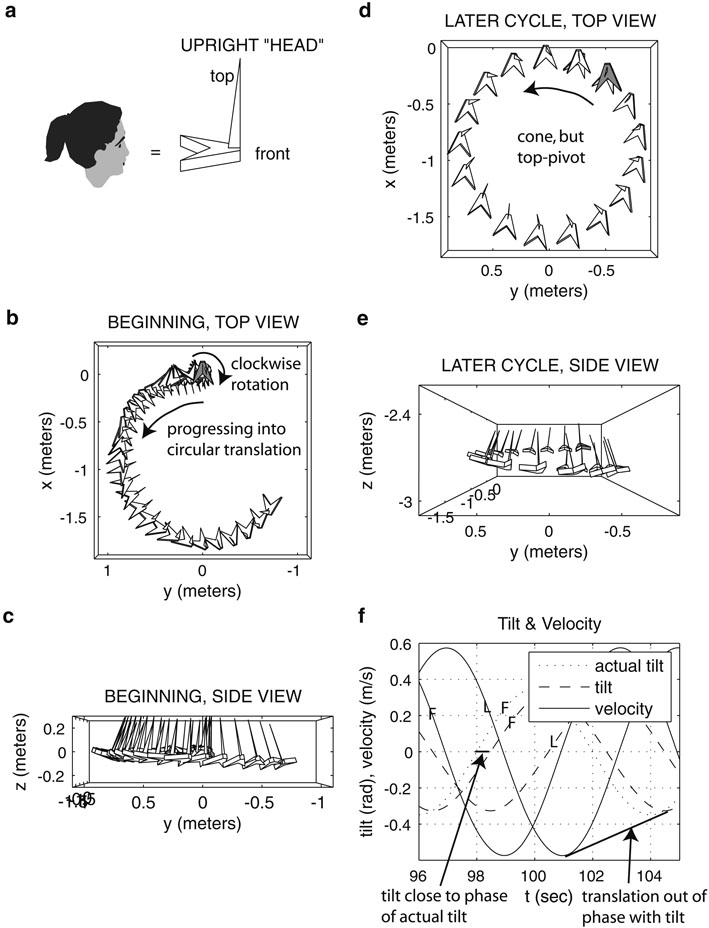
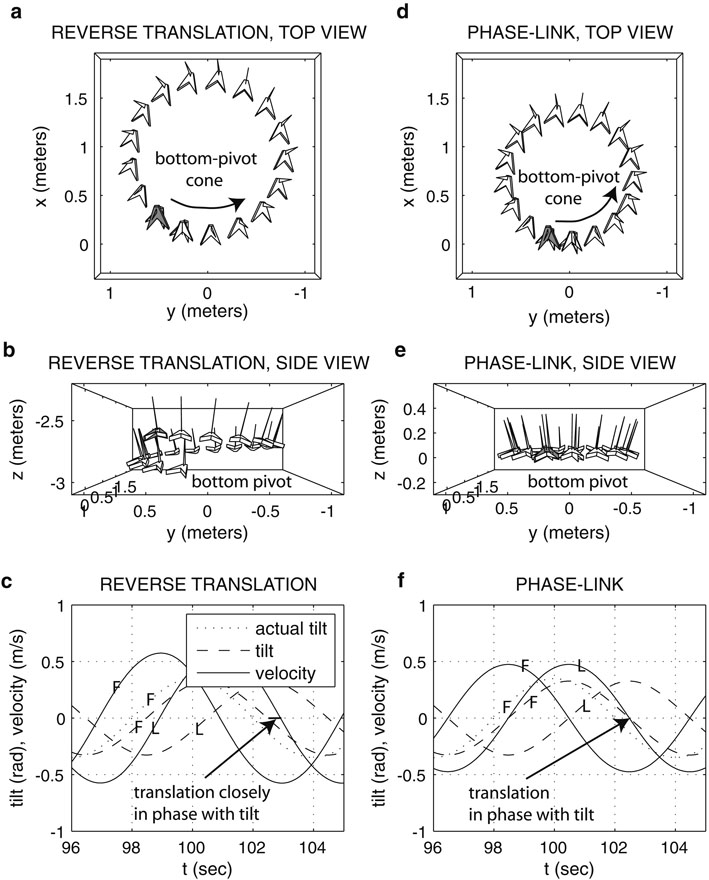
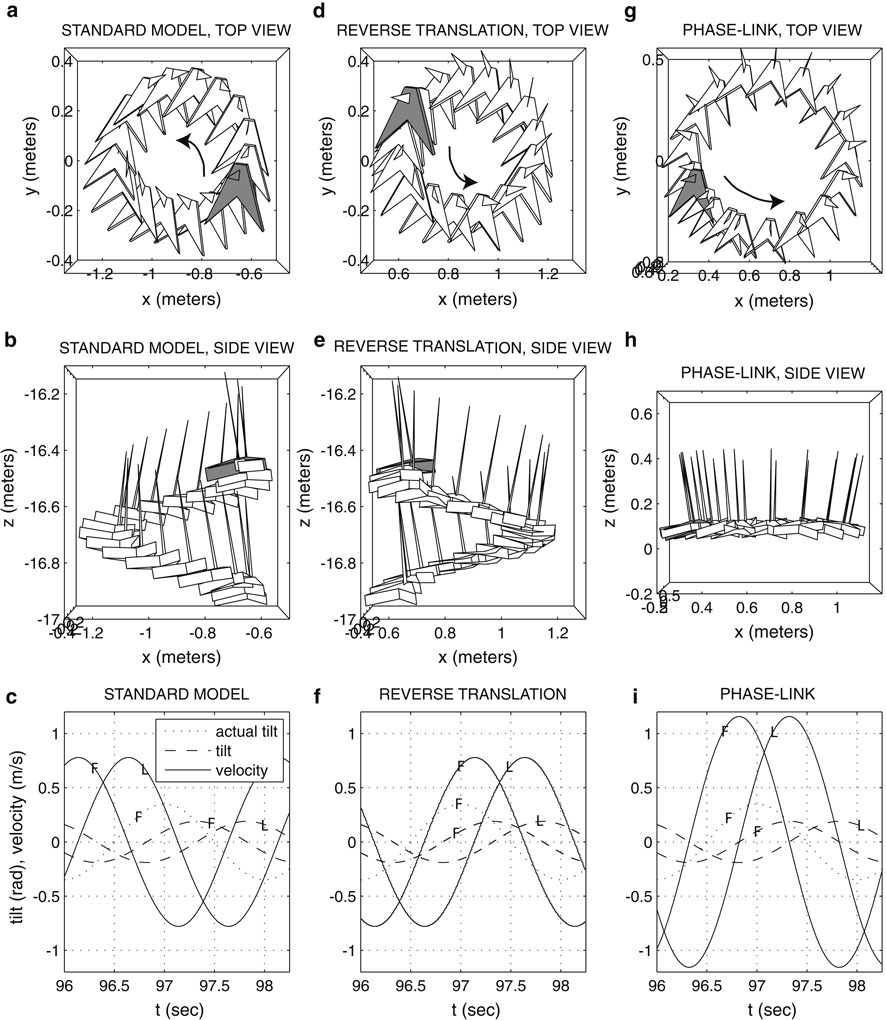
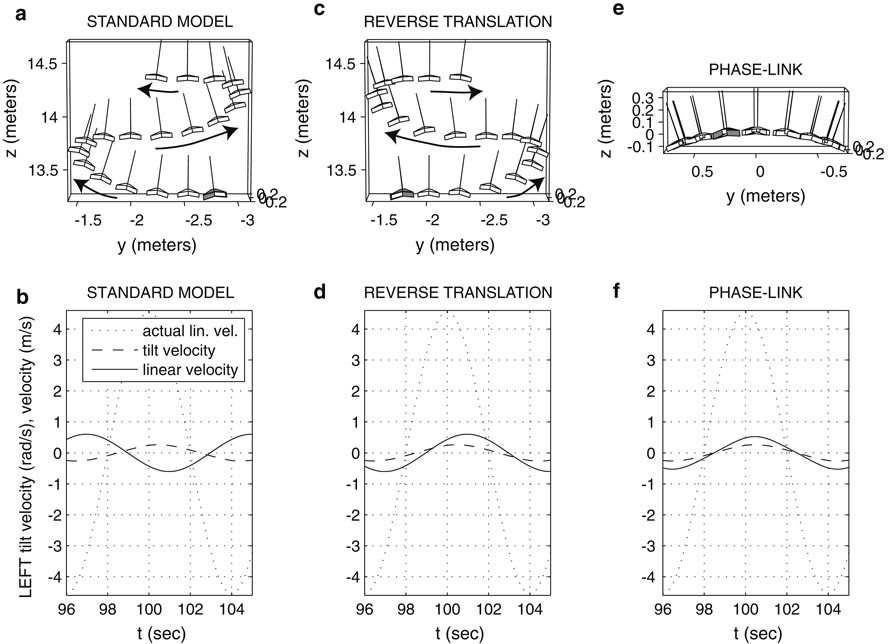
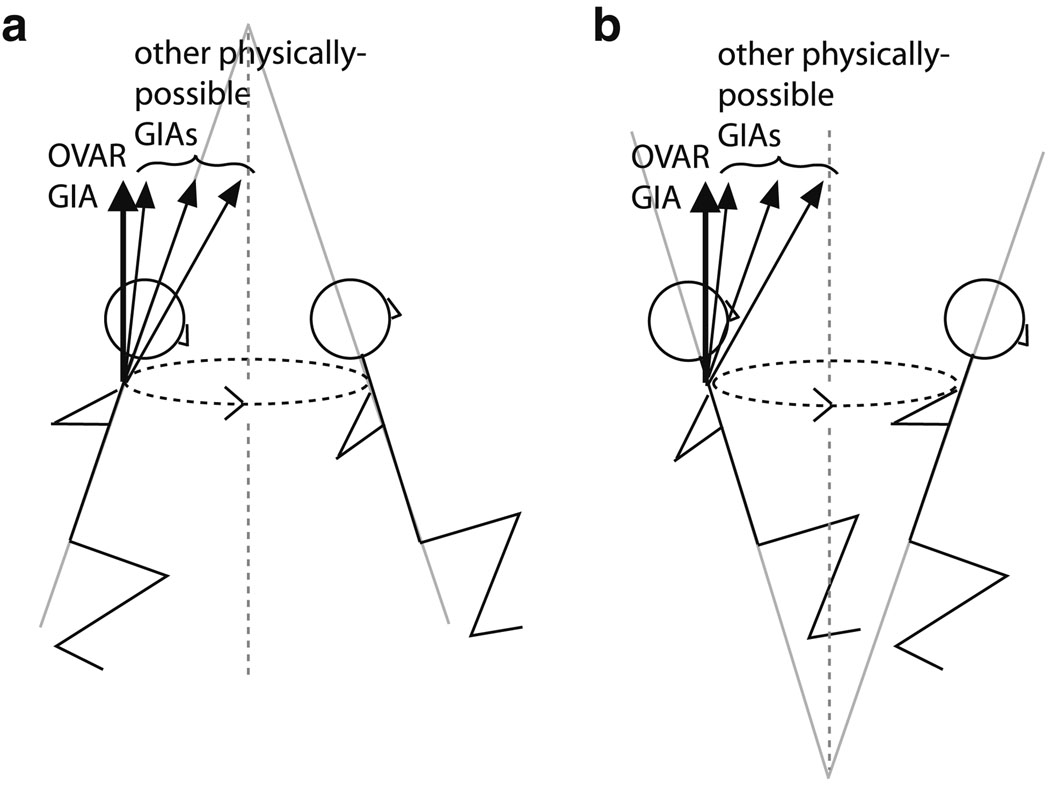
Human off-vertical axis rotation (OVAR) in the dark typically produces perceived motion about a cone, the amplitude of which changes as a function of frequency. This perception is commonly attributed to the fact that both the OVAR and the conical motion have a gravity vector that rotates about the subject. Little-known, however, is that this rotating-gravity explanation for perceived conical motion is inconsistent with basic observations about self-motion perception: (a) that the perceived vertical moves toward alignment with the gravito-inertial acceleration (GIA) and (b) that perceived translation arises from perceived linear acceleration, as derived from the portion of the GIA not associated with gravity. Mathematically proved in this article is the fact that during OVAR these properties imply mismatched phase of perceived tilt and translation, in contrast to the common perception of matched phases which correspond to conical motion with pivot at the bottom. This result demonstrates that an additional perceptual rule is required to explain perception in OVAR. This study investigates, both analytically and computationally, the phase relationship between tilt and translation at different stimulus rates-slow (45 degrees /s) and fast (180 degrees /s), and the three-dimensional shape of predicted perceived motion, under different sets of hypotheses about self-motion perception. We propose that for human motion perception, there is a phase-linking of tilt and translation movements to construct a perception of one's overall motion path. Alternative hypotheses to achieve the phase match were tested with three-dimensional computational models, comparing the output with published experimental reports. The best fit with experimental data was the hypothesis that the phase of perceived translation was linked to perceived tilt, while the perceived tilt was determined by the GIA. This hypothesis successfully predicted the bottom-pivot cone commonly reported and a reduced sense of tilt during fast OVAR. Similar considerations apply to the hilltop illusion often reported during horizontal linear oscillation. Known response properties of central neurons are consistent with this ability to phase-link translation with tilt. In addition, the competing "standard" model was mathematically proved to be unable to predict the bottom-pivot cone regardless of the values used for parameters in the model.
Figures
Similar articles
-
Effects of motion paradigm on human perception of tilt and translation.Sci Rep. 2022 Jan 26;12(1):1430. doi: 10.1038/s41598-022-05483-6. Sci Rep. 2022. PMID: 35082357 Free PMC article.
-
Tilt and translation motion perception during off-vertical axis rotation.Exp Brain Res. 2007 Sep;182(3):365-77. doi: 10.1007/s00221-007-0994-0. Epub 2007 Jun 13. Exp Brain Res. 2007. PMID: 17565488
-
Perception of tilt (somatogravic illusion) in response to sustained linear acceleration during space flight.Exp Brain Res. 2001 Jun;138(4):410-8. doi: 10.1007/s002210100706. Exp Brain Res. 2001. PMID: 11465738
-
Alteration of eye movements and motion perception in microgravity.Brain Res Brain Res Rev. 1998 Nov;28(1-2):161-72. doi: 10.1016/s0165-0173(98)00036-8. Brain Res Brain Res Rev. 1998. PMID: 9795198 Review.
-
Gravity or translation: central processing of vestibular signals to detect motion or tilt.J Vestib Res. 2003;13(4-6):245-53. J Vestib Res. 2003. PMID: 15096668 Review.
Cited by
-
Effects of motion paradigm on human perception of tilt and translation.Sci Rep. 2022 Jan 26;12(1):1430. doi: 10.1038/s41598-022-05483-6. Sci Rep. 2022. PMID: 35082357 Free PMC article.
-
Asymmetries and three-dimensional features of vestibular cross-coupled stimuli illuminated through modeling.J Vestib Res. 2016 Nov 3;26(4):343-358. doi: 10.3233/VES-160585. J Vestib Res. 2016. PMID: 27814310 Free PMC article.
-
Sensory conflict compared in microgravity, artificial gravity, motion sickness, and vestibular disorders.J Vestib Res. 2012 Jan 1;22(2):81-94. doi: 10.3233/VES-2012-0441. J Vestib Res. 2012. PMID: 23000608 Free PMC article.
-
Symmetries of a generic utricular projection: neural connectivity and the distribution of utricular information.J Math Biol. 2016 Feb;72(3):727-53. doi: 10.1007/s00285-015-0900-5. Epub 2015 Jun 10. J Math Biol. 2016. PMID: 26059813
-
Differences between perception and eye movements during complex motions.J Vestib Res. 2011;21(4):193-208. doi: 10.3233/VES-2011-0416. J Vestib Res. 2011. PMID: 21846952 Free PMC article.
References
-
- Albright TD. Centrifugal directional bias in the middle temporal visual area (MT) of the macaque. Vis Neurosci. 1989;2:177–188. - PubMed
-
- Angelaki DE. Dynamic polarization vector of spatially tuned neurons. IEEE Trans Biomed Eng. 1991;38:1053–1060. - PubMed
-
- Angelaki DE. Spatio-temporal convergence (STC) in otolith neurons. Biol Cybern. 1992;67:83–96. - PubMed
-
- Angelaki DE, Dickman JD. Spatiotemporal processing of linear acceleration: primary afferent and central vestibular neuron responses. J Neurophysiol. 2000;84:2113–2132. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
