

The impact of left hemisphere stroke on force control with familiar and novel objects: neuroanatomic substrates and relationship to apraxia
- PMID: 19945445
- PMCID: PMC2879003
- DOI: 10.1016/j.brainres.2009.11.034
The impact of left hemisphere stroke on force control with familiar and novel objects: neuroanatomic substrates and relationship to apraxia
Abstract
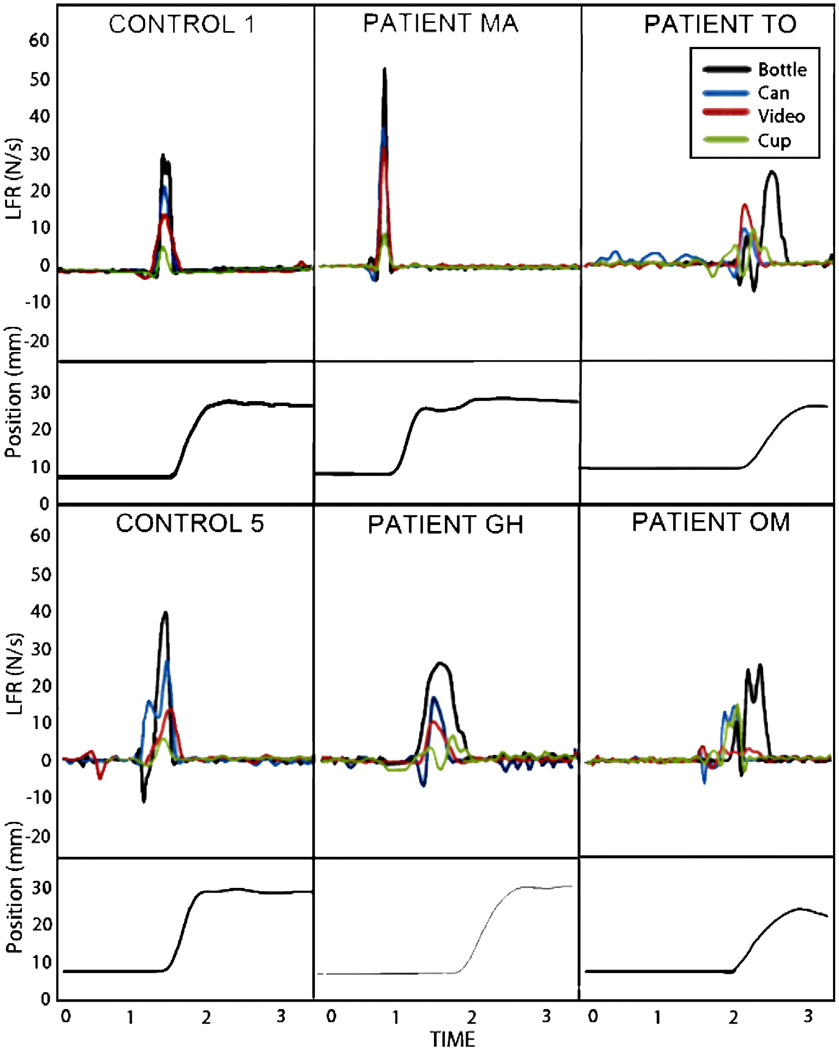
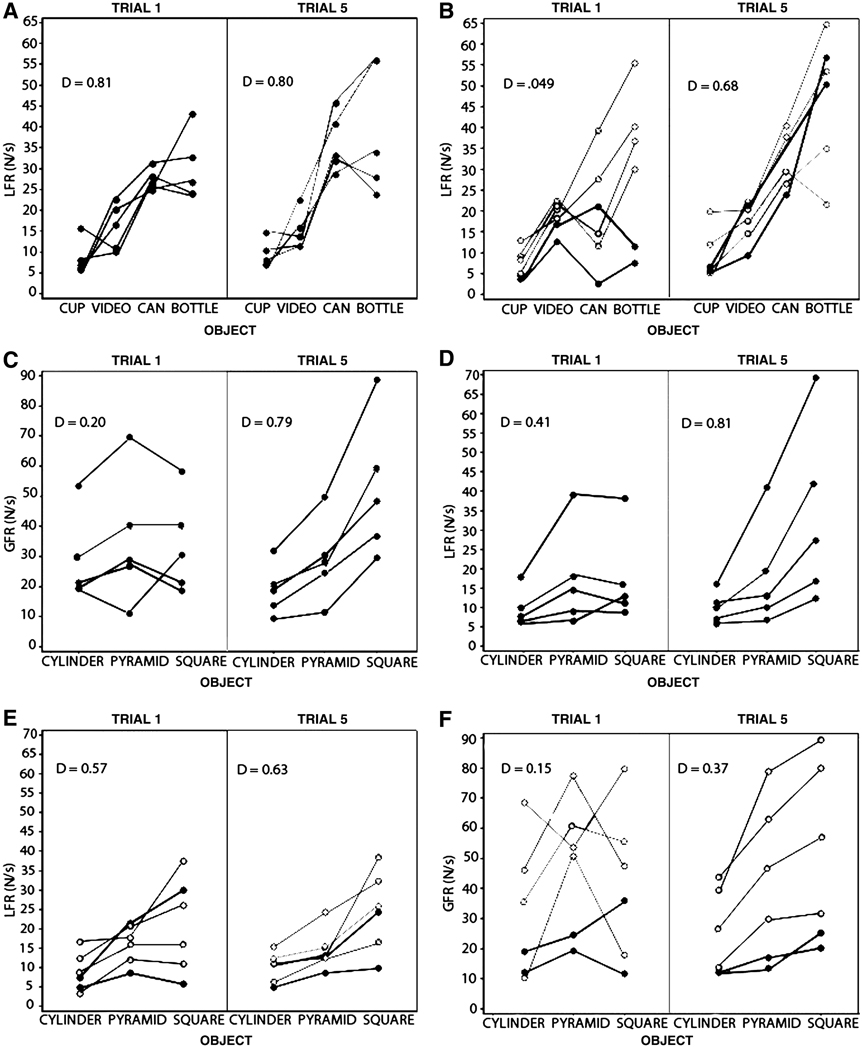
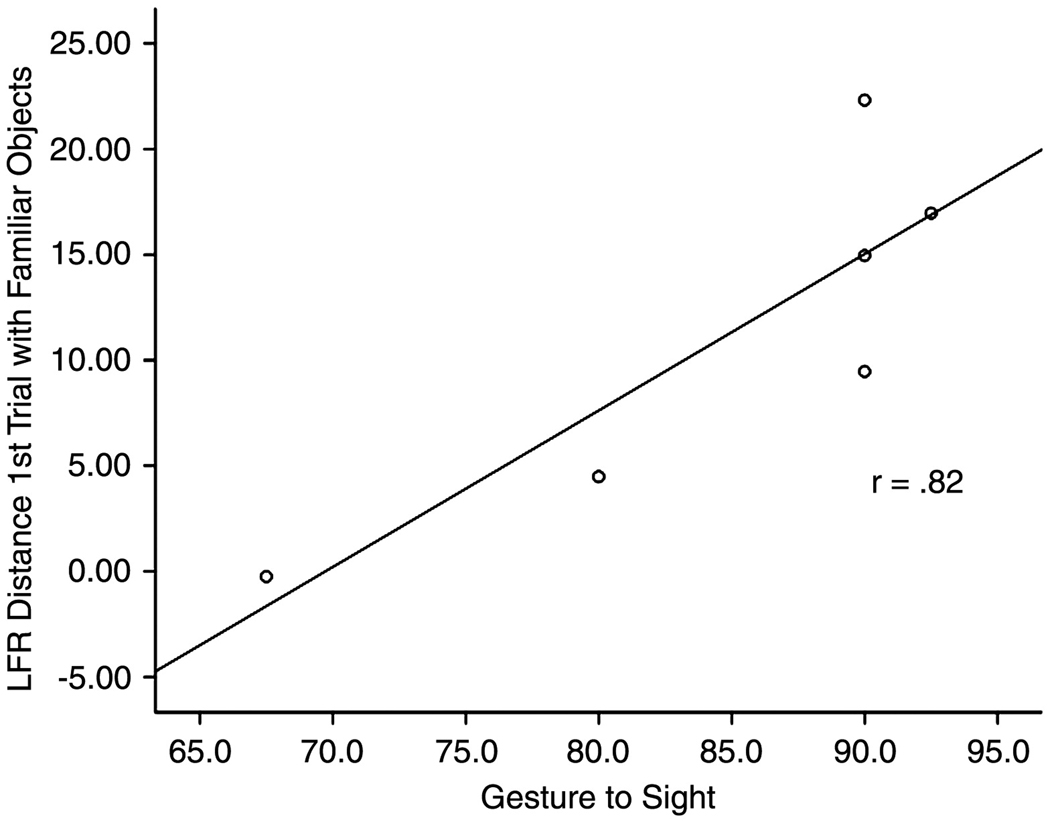
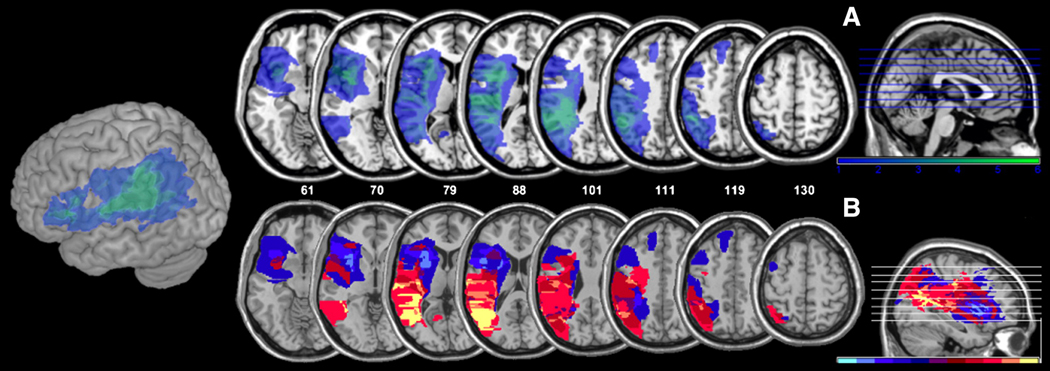
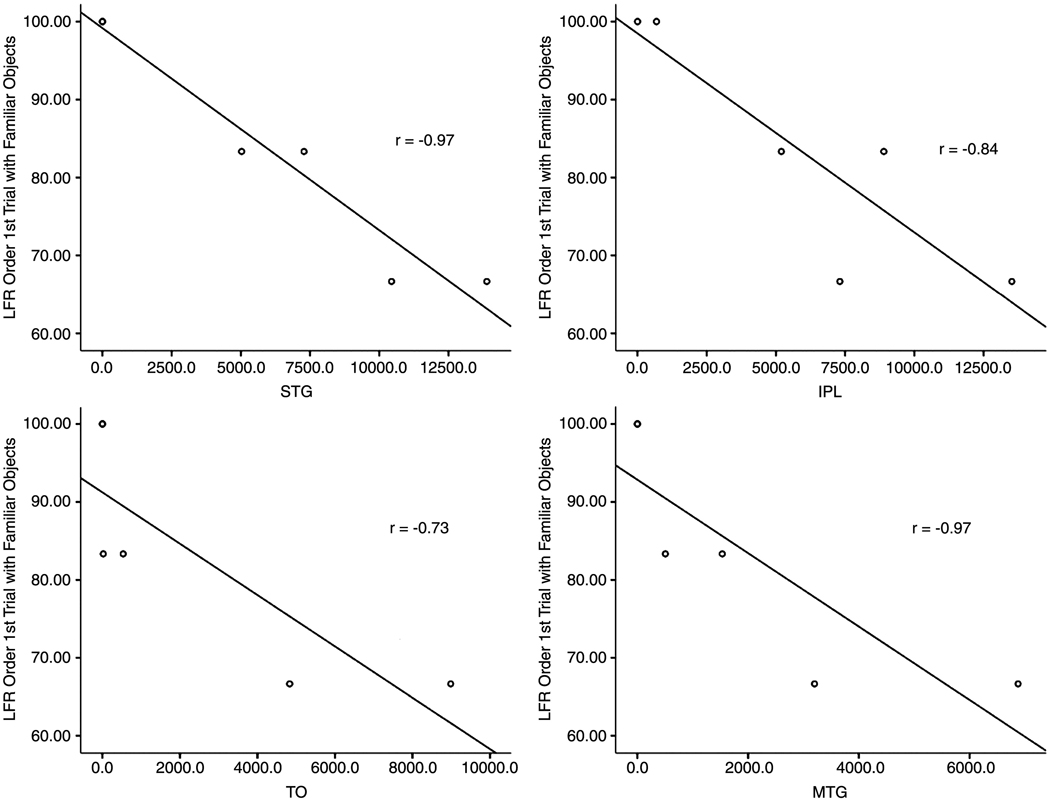
Fingertip force scaling for lifting objects frequently occurs in anticipation of finger contact. An ongoing question concerns the types of memories that are used to inform predictive control. Object-specific information such as weight may be stored and retrieved when previously encountered objects are lifted again. Alternatively, visual size and shape cues may provide estimates of object density each time objects are encountered. We reasoned that differences in performance with familiar versus novel objects would provide support for the former possibility. Anticipatory force production with both familiar and novel objects was assessed in six left hemisphere stroke patients, two of whom exhibited deficient actions with familiar objects (ideomotor apraxia; IMA), along with five control subjects. In contrast to healthy controls and stroke participants without IMA, participants with IMA displayed poor anticipatory scaling with familiar objects. However, like the other groups, IMA participants learned to differentiate fingertip forces with repeated lifts of both familiar and novel objects. Finally, there was a significant correlation between damage to the inferior parietal and superior and middle temporal lobes and impaired anticipatory control for familiar objects. These data support the hypotheses that anticipatory control during lifts of familiar objects in IMA patients are based on object-specific memories and that the ventro-dorsal stream is involved in the long-term storage of internal models used for anticipatory scaling during object manipulation.
2009 Elsevier B.V. All rights reserved.
Figures
References
-
- Beauchamp MS, Lee KSE, Haxby JV, Martin A. Parallel visual motion processing streams for manipulable objects and human movements. Neuron. 2002;34:149–159. - PubMed
-
- Bechtol CO. The use of a dynamometer with adjustable handle spacings. J Bone Jt Surg. 1954;36A:820–824. - PubMed
-
- Blennerhassett JM, Carey LM, Matyas TA. Grip force regulation during pinch grip lifts under somatosensory guidance: Comparison between people with stroke and healthy controls. Arch Phys Med Rehabil. 2006;87:418–429. - PubMed
-
- Boecker H, Lee A, Mühlau M, Ceballos-Baumann AO, Ritzl A, Spilker M, Marquardt C, Hermsdörfer J. Force level independent representation of predictive grip force-load force coupling: a PET activation study. Neuroimage. 2005;25:243–252. - PubMed
-
- Buxbaum LJ. Ideomotor apraxia: a call to action. Neurocase. 2001;7:445–458. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical
