

doi: 10.1097/JES.0b013e3181b7ea29.
Forward dynamics simulations provide insight into muscle mechanical work during human locomotion
Affiliations
- PMID: 19955870
- PMCID: PMC2789343
- DOI: 10.1097/JES.0b013e3181b7ea29
Item in Clipboard
Forward dynamics simulations provide insight into muscle mechanical work during human locomotion
Exerc Sport Sci Rev.
2009 Oct.
Abstract
Complex musculoskeletal models and computer simulations can provide critical insight into muscle mechanical work output during locomotion. Simulations provide both a consistent mechanical solution that can be interrogated at multiple levels (muscle fiber, musculotendon, net joint moment, and whole-body work) and an ideal framework to identify limitations with different estimates of muscle work and the resulting implications for metabolic cost and efficiency.
Figures
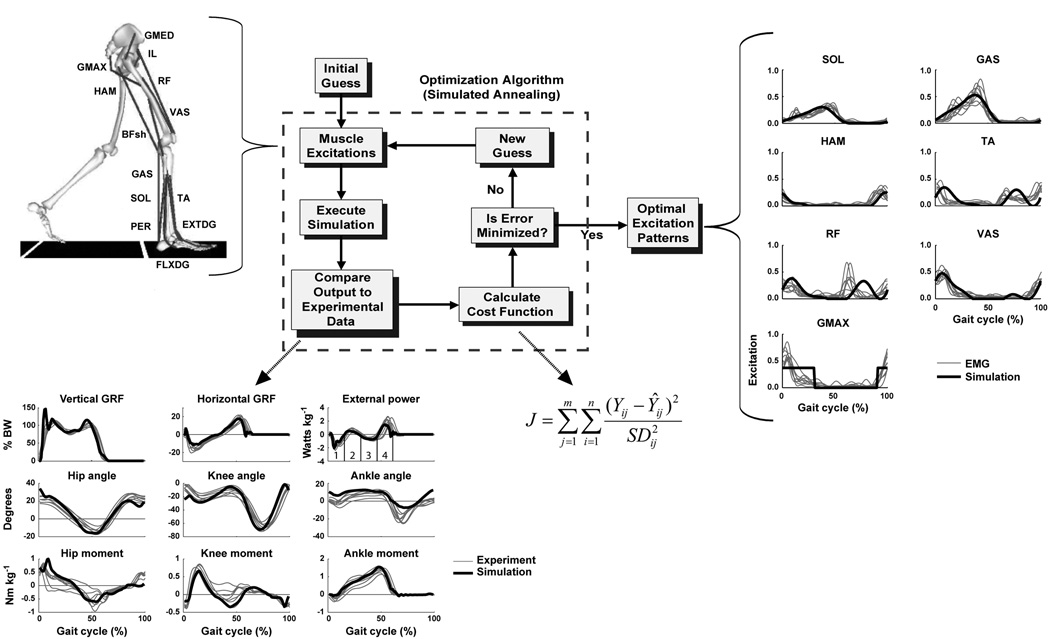
The musculoskeletal model and optimization framework used to generate forward dynamics simulations. The model consisted of a trunk (head, arms, torso and pelvis) and left and right legs (femur, tibia, patella, rear-foot, mid-foot and toes). Only the 13 muscle groups for the right leg are shown, which included GMED (anterior and posterior portion of gluteus medius), IL (iliacus, psoas), RF (rectus femoris), VAS (3-component vastus), TA (tibialis anterior, peroneus tertius), PER (peroneus longus, peroneus brevis), FLXDG (flexor hallucis longus, flexor digitorum longus), EXTDG (extensor hallucis longus, extensor digitorum longus), SOL (soleus, tibialis posterior), GAS (medial and lateral gastrocnemius), BFsh (biceps femoris short head), HAM (medial hamstrings, biceps femoris long head) and GMAX (gluteus maximus, adductor magnus). The Optimization Algorithm fine-tunes the muscle excitation patterns for each muscle group to produce a well-coordinated walking pattern that emulates the human subject data by minimizing cost function J. Y is the experimental data, Ŷ is the corresponding simulation data. The excitation patterns are defined by muscle EMG or a rectangular pattern if no EMG data is available. As seen in the Optimal Excitation Patterns, the resulting excitation patterns agree well with the human subject EMG data. For comparison purposes, the experimental EMG patterns (group mean ± s.d.) were normalized to the peak simulation excitation magnitude. The excitation patterns for the small muscles that primarily control the foot (PER, FLXDG, EXTDG) are omitted in the Optimal Excitation Patterns comparison. The Compare Output to Experimental Data shows how well the simulation emulates the experimental hip, knee and ankle joint angles, vertical and horizontal GRFs, and joint moments over the gait cycle (i.e., from right heel-strike to right heel-strike). [Adapted from Neptune RR, Clark DJ, Kautz SA. Modular control of human walking: a simulation study. Journal of Biomechanics. (2009, in press). Copyright © 2009 Elsevier. Used with permission.]
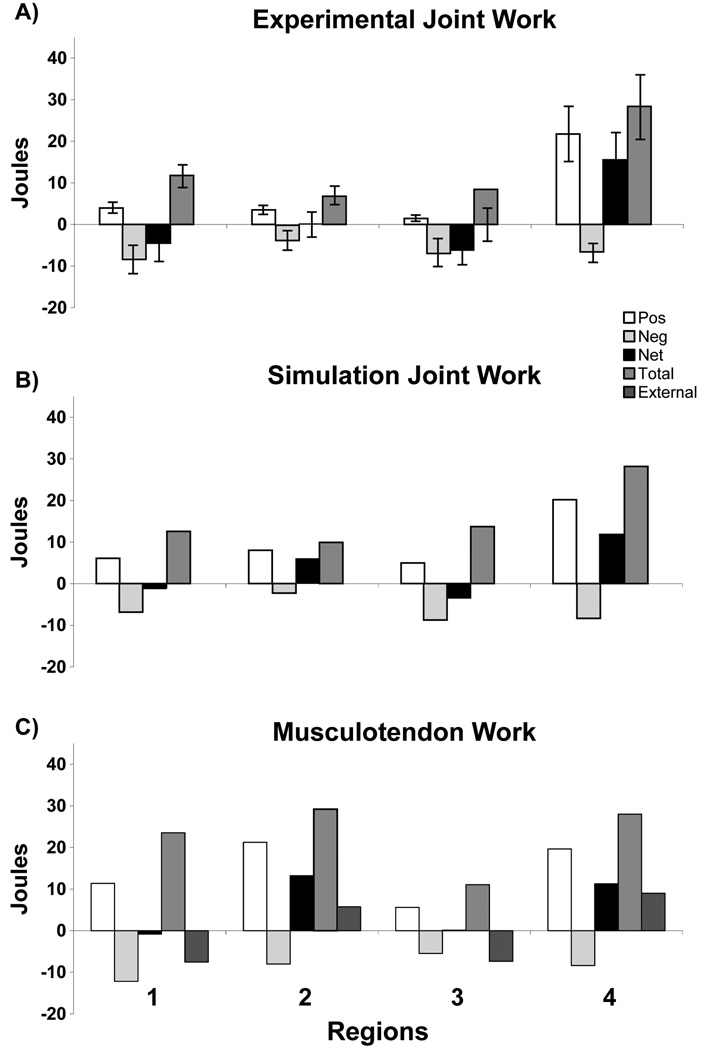
Comparison between A) experimental joint work, B) simulation joint work and C) corresponding simulation musculotendon work in each region defined by the positive/negative crossing points of the external power trajectory (see external power in Fig. 1). The simulations showed the musculotendon work is significant in Region 2, which is necessary to decelerate hip and knee flexion, provide lower-limb stability and accelerate the body center-of-mass vertically to provide body support.
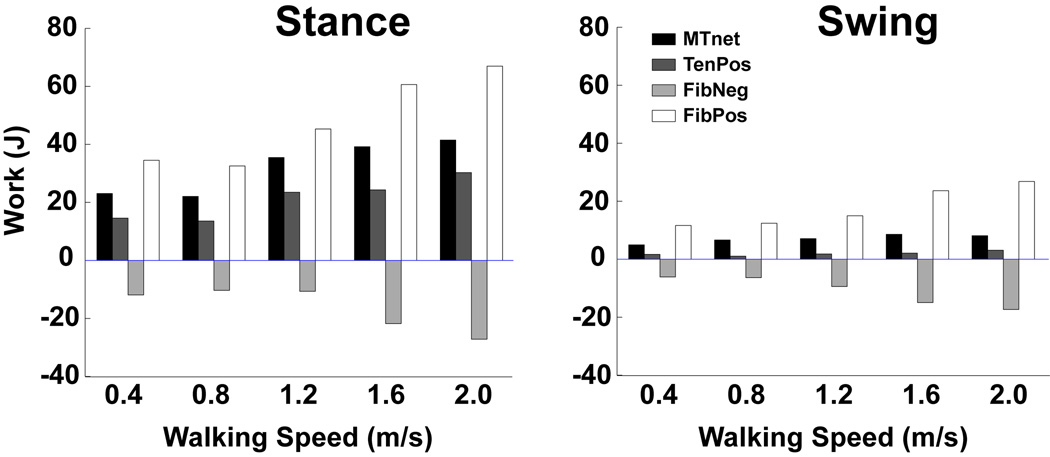
Total muscle fiber and tendon work across increasing walking speeds (net musculotendon work (MTnet), positive tendon work (TenPos, elastic energy recovered from the tendon), negative fiber work (FibNeg) and positive fiber work (FibPos)). The percent difference in muscle work between stance and swing decreases as walking speed increases. Note, the percent of elastic energy recovery in the tendons (Ten Pos/ (FibPos +TenPos)) was maximized at 30% when walking at 1.2 m/s, which is near the preferred walking speed. [Adapted from Neptune RR, Sasaki K, Kautz SA. The effect of walking speed on muscle function and mechanical energetics. Gait Posture. 2008; 28(1): 135–43. Copyright © 2008 Elsevier. Used with permission.]
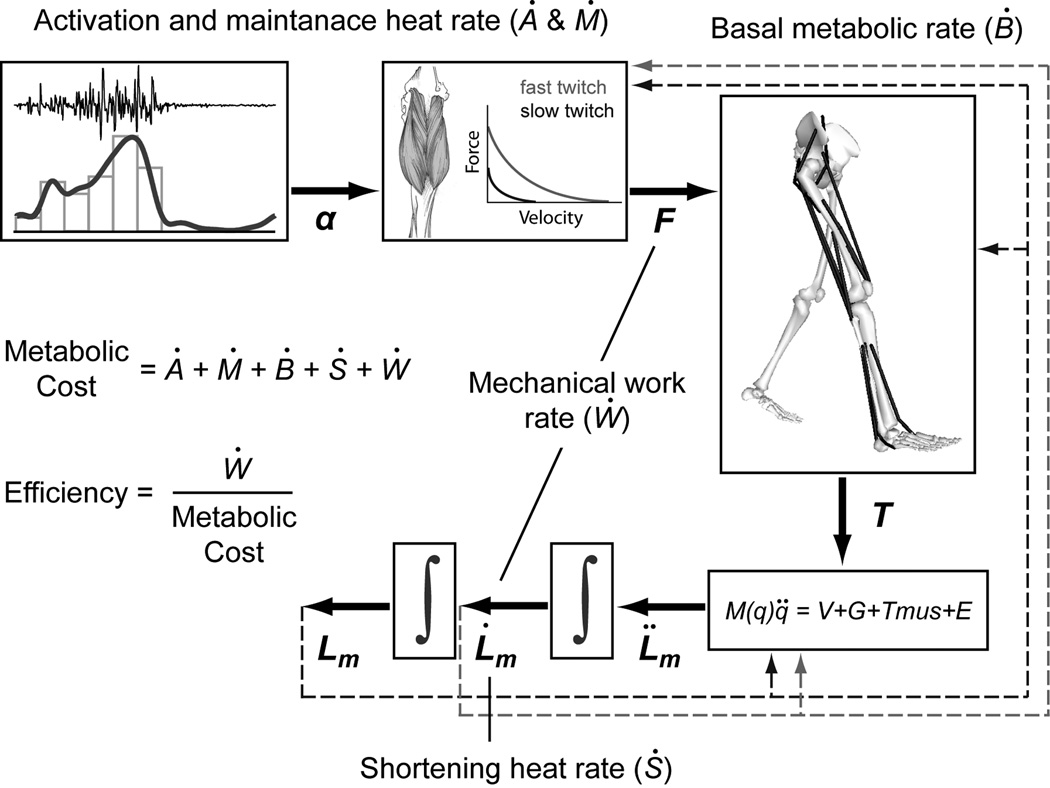
A schematic of a general muscle metabolic cost model implemented in a forward dynamics simulation framework. Activation heat rate (Ȧ) and maintenance heat rate (Ṁ) are commonly grouped together and depend on the muscle activation and the percentage of fiber types for each muscle. Basal heat rate (Ḃ) is based on the basal metabolic rate of muscle and is function of muscle mass. Shortening heat rate (Ṡ) is a function of muscle activation, muscle fiber type and rate of muscle shortening or lengthening. Mechanical work rate (Ẇ) is the product of muscle force and rate of muscle length change. The total metabolic rate for each muscle is the sum of the rates of heat production and mechanical work.
Similar articles
-
The relationships between muscle, external, internal and joint mechanical work during normal walking.J Exp Biol. 2009 Mar;212(Pt 5):738-44. doi: 10.1242/jeb.023267. J Exp Biol. 2009. PMID: 19218526 Free PMC article.
-
A two-muscle, continuum-mechanical forward simulation of the upper limb.Biomech Model Mechanobiol. 2017 Jun;16(3):743-762. doi: 10.1007/s10237-016-0850-x. Epub 2016 Nov 11. Biomech Model Mechanobiol. 2017. PMID: 27837360
-
Modeling and simulating the neuromuscular mechanisms regulating ankle and knee joint stiffness during human locomotion.J Neurophysiol. 2015 Oct;114(4):2509-27. doi: 10.1152/jn.00989.2014. Epub 2015 Aug 5. J Neurophysiol. 2015. PMID: 26245321 Free PMC article.
-
Biomechanics and muscle coordination of human walking: part II: lessons from dynamical simulations and clinical implications.Gait Posture. 2003 Feb;17(1):1-17. doi: 10.1016/s0966-6362(02)00069-3. Gait Posture. 2003. PMID: 12535721 Review.
-
Biomechanics and muscle coordination of human walking. Part I: introduction to concepts, power transfer, dynamics and simulations.Gait Posture. 2002 Dec;16(3):215-32. doi: 10.1016/s0966-6362(02)00068-1. Gait Posture. 2002. PMID: 12443946 Review.
Cited by
-
Posture shifting after spinal cord injury using functional neuromuscular stimulation--a computer simulation study.J Biomech. 2011 Jun 3;44(9):1639-45. doi: 10.1016/j.jbiomech.2010.12.020. J Biomech. 2011. PMID: 21536290 Free PMC article.
-
A comparative collision-based analysis of human gait.Proc Biol Sci. 2013 Oct 2;280(1771):20131779. doi: 10.1098/rspb.2013.1779. Print 2013 Nov 22. Proc Biol Sci. 2013. PMID: 24089334 Free PMC article.
-
Does joint impedance improve dynamic leg simulations with explicit and implicit solvers?PLoS One. 2023 Jul 3;18(7):e0282130. doi: 10.1371/journal.pone.0282130. eCollection 2023. PLoS One. 2023. PMID: 37399198 Free PMC article.
-
Essential kinematic information, athletic experience, and affordance perception for others.Psychon Bull Rev. 2014 Jun;21(3):823-9. doi: 10.3758/s13423-013-0539-4. Psychon Bull Rev. 2014. PMID: 24243136
-
A Dynamic Simulation of Musculoskeletal Function in the Mouse Hindlimb During Trotting Locomotion.Front Bioeng Biotechnol. 2018 May 16;6:61. doi: 10.3389/fbioe.2018.00061. eCollection 2018. Front Bioeng Biotechnol. 2018. PMID: 29868576 Free PMC article.
References
-
- Anderson FC, Pandy MG. Dynamic optimization of human walking. J Biomech Eng. 2001;123(5):381–390. - PubMed
-
- Bhargava LJ, Pandy MG, Anderson FC. A phenomenological model for estimating metabolic energy consumption in muscle contraction. J Biomech. 2004;37(1):81–88. - PubMed
-
- Blemker SS, Asakawa DS, Gold GE, Delp SL. Image-based musculoskeletal modeling: applications, advances, and future opportunities. J Magn Reson Imaging. 2007;25(2):441–451. - PubMed
-
- Cahouet V, Luc M, David A. Static optimal estimation of joint accelerations for inverse dynamics problem solution. J Biomech. 2002;35(11):1507–1513. - PubMed
-
- Doke J, Donelan JM, Kuo AD. Mechanics and energetics of swinging the human leg. J Exp Biol. 2005;208(Pt 3):439–445. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
