

Robotic lower limb exoskeletons using proportional myoelectric control
- PMID: 19964579
- PMCID: PMC2833282
- DOI: 10.1109/IEMBS.2009.5333984
Robotic lower limb exoskeletons using proportional myoelectric control
Abstract
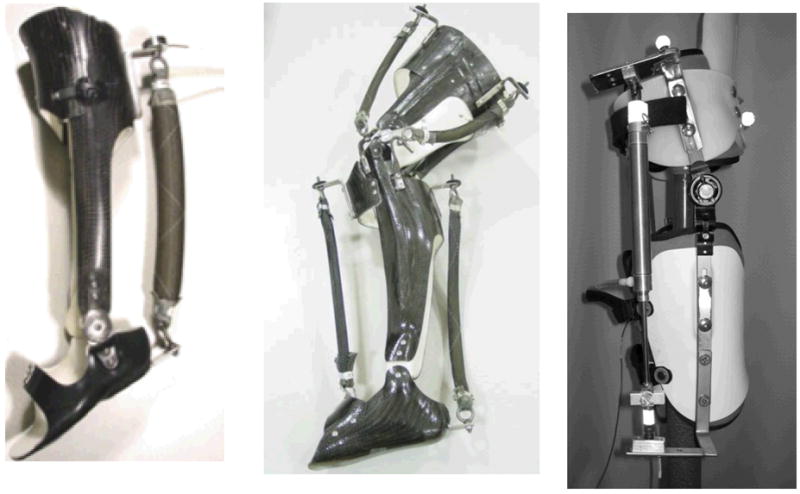
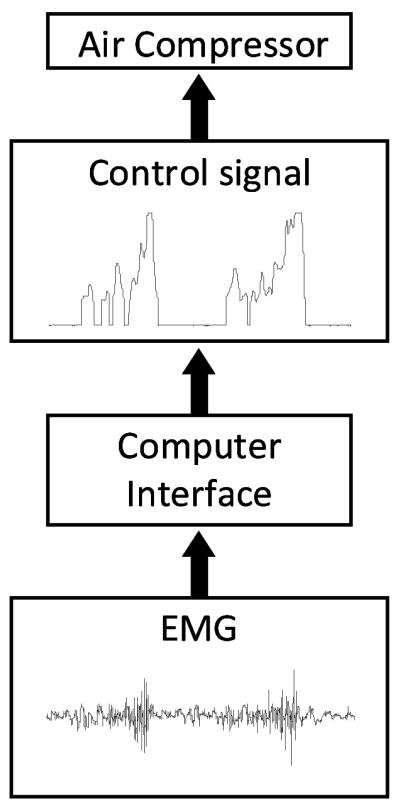
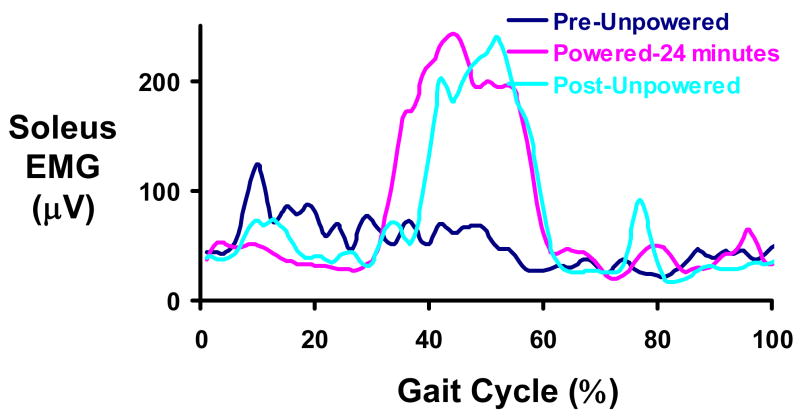
Robotic lower limb exoskeletons have been built for augmenting human performance, assisting with disabilities, studying human physiology, and re-training motor deficiencies. At the University of Michigan Human Neuromechanics Laboratory, we have built pneumatically-powered lower limb exoskeletons for the last two purposes. Most of our prior research has focused on ankle joint exoskeletons because of the large contribution from plantar flexors to the mechanical work performed during gait. One way we control the exoskeletons is with proportional myoelectric control, effectively increasing the strength of the wearer with a physiological mode of control. Healthy human subjects quickly adapt to walking with the robotic ankle exoskeletons, reducing their overall energy expenditure. Individuals with incomplete spinal cord injury have demonstrated rapid modification of muscle recruitment patterns with practice walking with the ankle exoskeletons. Evidence suggests that proportional myoelectric control may have distinct advantages over other types of control for robotic exoskeletons in basic science and rehabilitation.
Figures
References
-
- Mone G. Building the real Iron Man. Popular Science. 2008 April;
-
- Ferris DP, Bohra ZA, Lukos JR, Kinnaird CR. Neuromechanical adaptation to hopping with an elastic ankle-foot orthosis. Journal of Applied Physiology. 2006 Jan;100:163–70. - PubMed
-
- Ferris DP, Gordon KE, Sawicki GS, Peethambaran A. An improved powered ankle-foot orthosis using proportional myoelectric control. Gait and Posture. 2006 Jun;23:425–8. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources