

Performance adaptive training control strategy for recovering wrist movements in stroke patients: a preliminary, feasibility study
- PMID: 19968873
- PMCID: PMC2799433
- DOI: 10.1186/1743-0003-6-44
Performance adaptive training control strategy for recovering wrist movements in stroke patients: a preliminary, feasibility study
Abstract
Background: In the last two decades robot training in neuromotor rehabilitation was mainly focused on shoulder-elbow movements. Few devices were designed and clinically tested for training coordinated movements of the wrist, which are crucial for achieving even the basic level of motor competence that is necessary for carrying out ADLs (activities of daily life). Moreover, most systems of robot therapy use point-to-point reaching movements which tend to emphasize the pathological tendency of stroke patients to break down goal-directed movements into a number of jerky sub-movements. For this reason we designed a wrist robot with a range of motion comparable to that of normal subjects and implemented a self-adapting training protocol for tracking smoothly moving targets in order to facilitate the emergence of smoothness in the motor control patterns and maximize the recovery of the normal RoM (range of motion) of the different DoFs (degrees of Freedom).
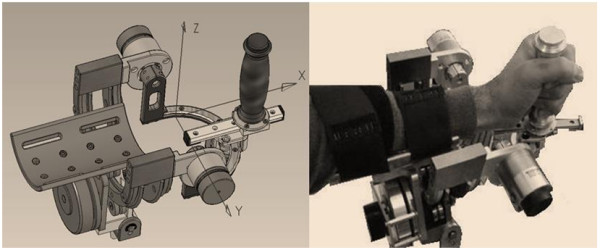
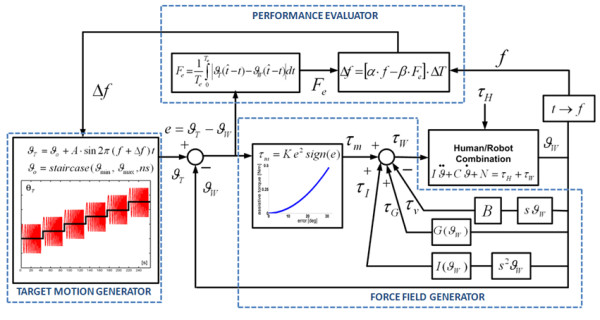
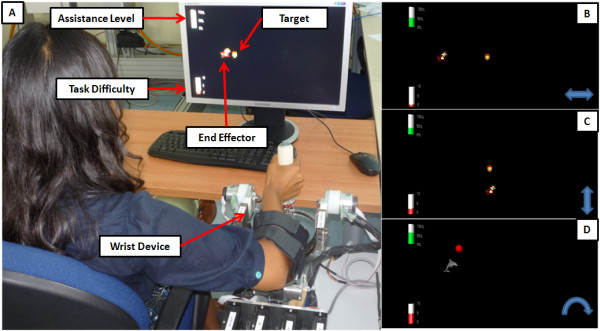
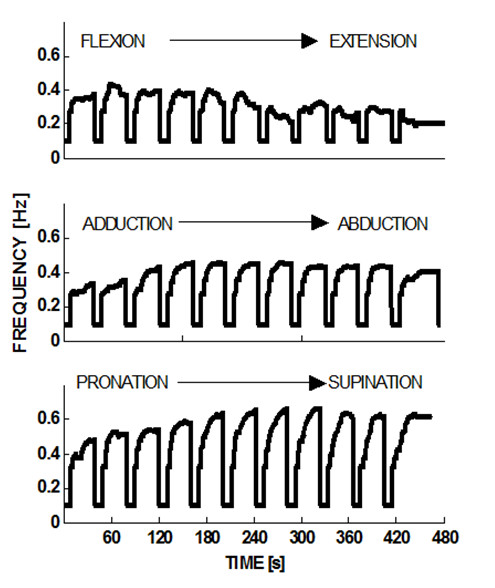
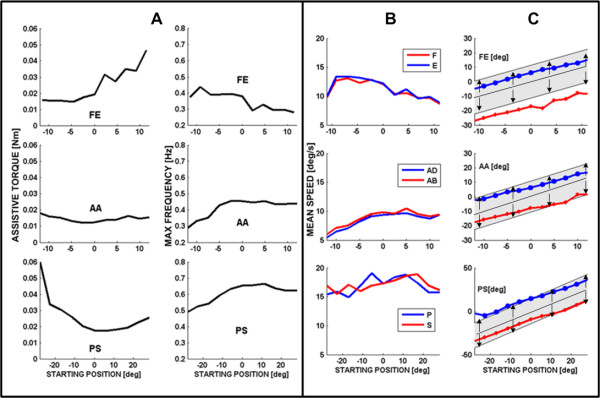
Methods: The IIT-wrist robot is a 3 DoFs light exoskeleton device, with direct-drive of each DoF and a human-like range of motion for Flexion/Extension (FE), Abduction/Adduction (AA) and Pronation/Supination (PS). Subjects were asked to track a variable-frequency oscillating target using only one wrist DoF at time, in such a way to carry out a progressive splinting therapy. The RoM of each DoF was angularly scanned in a staircase-like fashion, from the "easier" to the "more difficult" angular position. An Adaptive Controller evaluated online performance parameters and modulated both the assistance and the difficulty of the task in order to facilitate smoother and more precise motor command patterns.
Results: Three stroke subjects volunteered to participate in a preliminary test session aimed at verify the acceptability of the device and the feasibility of the designed protocol. All of them were able to perform the required task. The wrist active RoM of motion was evaluated for each patient at the beginning and at the end of the test therapy session and the results suggest a positive trend.
Conclusion: The positive outcomes of the preliminary tests motivate the planning of a clinical trial and provide experimental evidence for defining appropriate inclusion/exclusion criteria.
Figures
Similar articles
-
Wrist rehabilitation in chronic stroke patients by means of adaptive, progressive robot-aided therapy.IEEE Trans Neural Syst Rehabil Eng. 2014 Mar;22(2):312-25. doi: 10.1109/TNSRE.2013.2250521. IEEE Trans Neural Syst Rehabil Eng. 2014. PMID: 23508271
-
Improving the ROM of wrist movements in stroke patients by means of a haptic wrist robot.Annu Int Conf IEEE Eng Med Biol Soc. 2011;2011:2077-80. doi: 10.1109/IEMBS.2011.6090385. Annu Int Conf IEEE Eng Med Biol Soc. 2011. PMID: 22254746
-
Pilot Study of a Powered Exoskeleton for Upper Limb Rehabilitation Based on the Wheelchair.Biomed Res Int. 2019 Dec 17;2019:9627438. doi: 10.1155/2019/9627438. eCollection 2019. Biomed Res Int. 2019. PMID: 31976331 Free PMC article.
-
Robot-aided neurorehabilitation: a robot for wrist rehabilitation.IEEE Trans Neural Syst Rehabil Eng. 2007 Sep;15(3):327-35. doi: 10.1109/TNSRE.2007.903899. IEEE Trans Neural Syst Rehabil Eng. 2007. PMID: 17894265 Free PMC article. Review.
-
State of the art in parallel ankle rehabilitation robot: a systematic review.J Neuroeng Rehabil. 2021 Mar 20;18(1):52. doi: 10.1186/s12984-021-00845-z. J Neuroeng Rehabil. 2021. PMID: 33743757 Free PMC article.
Cited by
-
Wrist Position Sense in Two Dimensions: Between-Hand Symmetry and Anisotropic Accuracy Across the Space.Front Hum Neurosci. 2021 Apr 22;15:662768. doi: 10.3389/fnhum.2021.662768. eCollection 2021. Front Hum Neurosci. 2021. PMID: 33967724 Free PMC article.
-
SEFRE: Semiexoskeleton Rehabilitation System.Appl Bionics Biomech. 2016;2016:8306765. doi: 10.1155/2016/8306765. Epub 2016 Aug 4. Appl Bionics Biomech. 2016. PMID: 27578961 Free PMC article.
-
Sustained Isometric Wrist Flexion and Extension Maximal Voluntary Contractions Similarly Impair Hand-Tracking Accuracy in Young Adults Using a Wrist Robot.Front Sports Act Living. 2020 May 8;2:53. doi: 10.3389/fspor.2020.00053. eCollection 2020. Front Sports Act Living. 2020. PMID: 33345044 Free PMC article.
-
Body representation underlies response of proprioceptive acuity to repetitive peripheral magnetic stimulation.Front Hum Neurosci. 2022 Aug 9;16:924123. doi: 10.3389/fnhum.2022.924123. eCollection 2022. Front Hum Neurosci. 2022. PMID: 36016664 Free PMC article.
-
Coupling Robot-Aided Assessment and Surface Electromyography (sEMG) to Evaluate the Effect of Muscle Fatigue on Wrist Position Sense in the Flexion-Extension Plane.Front Hum Neurosci. 2019 Nov 1;13:396. doi: 10.3389/fnhum.2019.00396. eCollection 2019. Front Hum Neurosci. 2019. PMID: 31736733 Free PMC article.
References
-
- Gupta A, O'Malley MK, Patoglu V, Burgar C. Design, Control and Performance of RiceWist: A Force Feedback Exoskeleton for Wrist Rehabilitation and Training. The Intl J of Robotics Res. 2008;27(1):233–251. doi: 10.1177/0278364907084261. - DOI
-
- Shor PC, Lum PS, Burgar CG, Loos HFM Van der, Majmundar M, Yap R. In: The Effect of Robotic-Aided Therapy on Upper Extremity Joint Passive Range of Motion Pain", Proc of Intl Conf on Rehab Robotics, Integration of Assisted Technol in the Information Age. Mounir Mokhtari, editor. IOS Press; 2001. pp. 79–83.
-
- Takaiwa M, Noritsugu T. Development of Wrist Rehabilitation Equipment Using Pneumatic Parallel Manipulator. Proceeding of the 2005 IEEE International Conference of Robotics and Automation, Barcelona. 2005. pp. 2302–2307. full_text.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
