

Generating spatiotemporal joint torque patterns from dynamical synchronization of distributed pattern generators
- PMID: 20011216
- PMCID: PMC2790947
- DOI: 10.3389/neuro.12.002.2009
Generating spatiotemporal joint torque patterns from dynamical synchronization of distributed pattern generators
Abstract
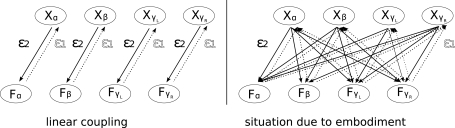
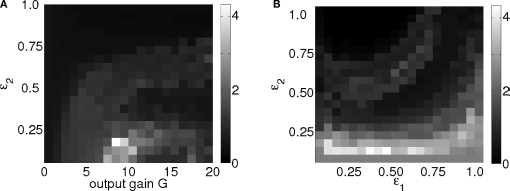
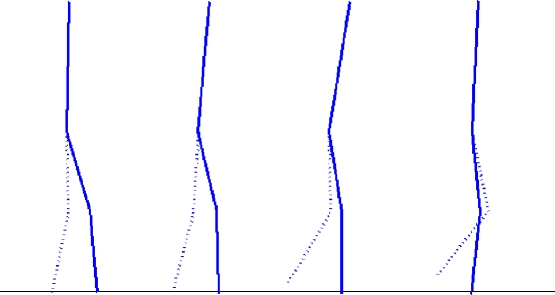
Pattern generators found in the spinal cord are no more seen as simple rhythmic oscillators for motion control. Indeed, they achieve flexible and dynamical coordination in interaction with the body and the environment dynamics giving to rise motor synergies. Discovering the mechanisms underlying the control of motor synergies constitutes an important research question not only for neuroscience but also for robotics: the motors coordination of high dimensional robotic systems is still a drawback and new control methods based on biological solutions may reduce their overall complexity. We propose to model the flexible combination of motor synergies in embodied systems via partial phase synchronization of distributed chaotic systems; for specific coupling strength, chaotic systems are able to phase synchronize their dynamics to the resonant frequencies of one external force. We take advantage of this property to explore and exploit the intrinsic dynamics of one specified embodied system. In two experiments with bipedal walkers, we show how motor synergies emerge when the controllers phase synchronize to the body's dynamics, entraining it to its intrinsic behavioral patterns. This stage is characterized by directed information flow from the sensors to the motors exhibiting the optimal situation when the body dynamics drive the controllers (mutual entrainment). Based on our results, we discuss the relevance of our findings for modeling the modular control of distributed pattern generators exhibited in the spinal cord, and for exploring the motor synergies in robots.
Keywords: causal information flow; motor synergies; phase synchronization; sensorimotor coordination.
Figures













Similar articles
-
Electromyographic identification of spinal oscillator patterns and recouplings in a patient with incomplete spinal cord lesion: oscillator formation training as a method to improve motor activities.Gen Physiol Biophys. 1996 Aug;15 Suppl 1:121-220. Gen Physiol Biophys. 1996. PMID: 8934200
-
A computational analysis of motor synergies by dynamic response decomposition.Front Comput Neurosci. 2014 Jan 16;7:191. doi: 10.3389/fncom.2013.00191. eCollection 2013. Front Comput Neurosci. 2014. PMID: 24474915 Free PMC article.
-
Modular neuromuscular control of human locomotion by central pattern generator.J Biomech. 2017 Feb 28;53:154-162. doi: 10.1016/j.jbiomech.2017.01.020. Epub 2017 Jan 19. J Biomech. 2017. PMID: 28126336
-
Reorganization of the human central nervous system.Gen Physiol Biophys. 2000 Oct;19 Suppl 1:11-240. Gen Physiol Biophys. 2000. PMID: 11252267 Review.
-
Integration of feedforward and feedback control in the neuromechanics of vertebrate locomotion: a review of experimental, simulation and robotic studies.J Exp Biol. 2023 Aug 1;226(15):jeb245784. doi: 10.1242/jeb.245784. Epub 2023 Aug 11. J Exp Biol. 2023. PMID: 37565347 Review.
Cited by
-
Intrathecal delivery of BDNF to the lumbar spinal cord modulates lumbar interneurons activity in a feline model of spinal cord injury.J Neural Eng. 2025 Feb 21;22(1):10.1088/1741-2552/adb0f3. doi: 10.1088/1741-2552/adb0f3. J Neural Eng. 2025. PMID: 39889354
-
On the role of sensory feedbacks in rowat-selverston CpG to improve robot legged locomotion.Front Neurorobot. 2010 Dec 29;4:113. doi: 10.3389/fnbot.2010.00113. eCollection 2010. Front Neurorobot. 2010. PMID: 21228904 Free PMC article.
References
-
- Aoi S., Tsuchiya K. (2007). Self-stability of a simple walking model driven by a rhythmic signal. Nonlinear Dyn. 48, 1–1610.1007/s11071-006-9030-3 - DOI
-
- Bernstein N. (1967). The Coordination and Regulation of Movements. Oxford, Pergamon Press
LinkOut - more resources
Full Text Sources