

Optimality principles for model-based prediction of human gait
- PMID: 20074736
- PMCID: PMC2849893
- DOI: 10.1016/j.jbiomech.2009.12.012
Optimality principles for model-based prediction of human gait
Abstract
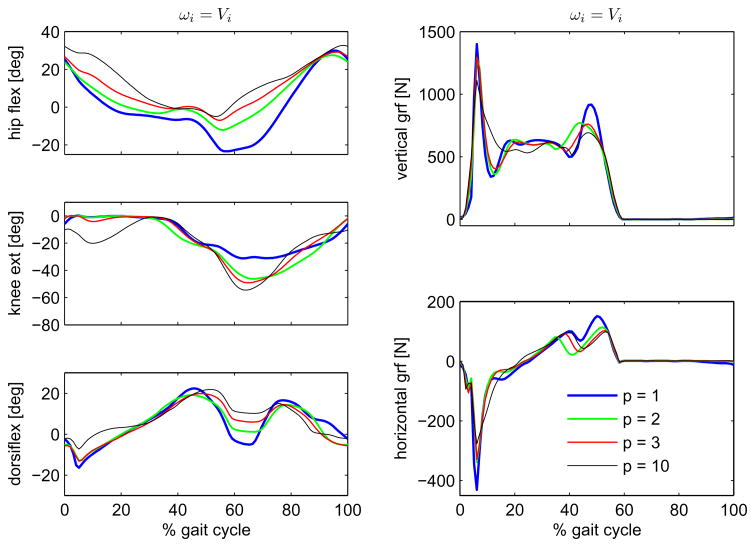
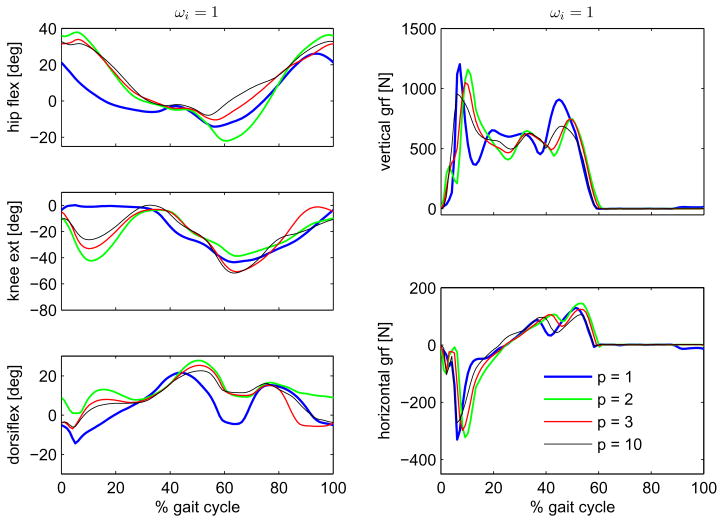
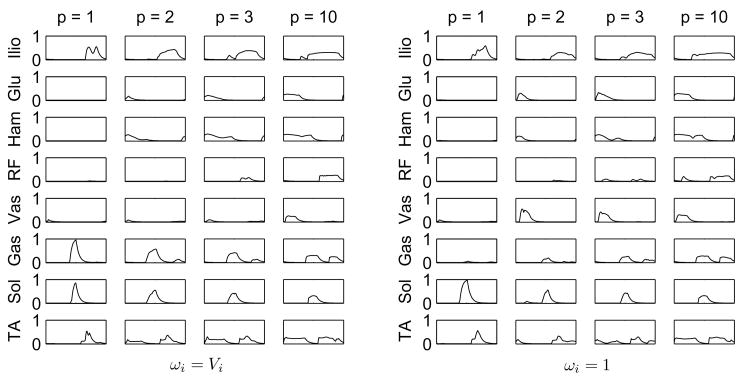
Although humans have a large repertoire of potential movements, gait patterns tend to be stereotypical and appear to be selected according to optimality principles such as minimal energy. When applied to dynamic musculoskeletal models such optimality principles might be used to predict how a patient's gait adapts to mechanical interventions such as prosthetic devices or surgery. In this paper we study the effects of different performance criteria on predicted gait patterns using a 2D musculoskeletal model. The associated optimal control problem for a family of different cost functions was solved utilizing the direct collocation method. It was found that fatigue-like cost functions produced realistic gait, with stance phase knee flexion, as opposed to energy-related cost functions which avoided knee flexion during the stance phase. We conclude that fatigue minimization may be one of the primary optimality principles governing human gait.
Copyright 2009 Elsevier Ltd. All rights reserved.
Figures

References
-
- Aerts P, de Clercq D. Deformation characteristics of the heel region of the shod foot during a simulated heel strike: the effect of varying midsole hardness. Journal of Sports Sciences. 1993;11:449–461. - PubMed
-
- Anderson FC, Pandy MG. Dynamic optimization of human walking. Journal of Biomechanical Engineering. 2001;123:381–390. - PubMed
-
- Bertram JEA, Ruina A. Multiple walking speed-frequency relations are predicted by constrained optimization. Journal of Theoretical Biology. 2001;209:445–453. - PubMed
-
- Betts JT. Survey of numerical methods for trajectory optimization. Journal of Guidance, Control, and Dynamics. 1998;21:193–207.
-
- Betts JT. Practical Methods for Optimal Control Using Nonlinear Programming. SIAM; 2001.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
