

Image-guided intraoperative cortical deformation recovery using game theory: application to neocortical epilepsy surgery
- PMID: 20129844
- PMCID: PMC2824434
- DOI: 10.1109/TMI.2009.2027993
Image-guided intraoperative cortical deformation recovery using game theory: application to neocortical epilepsy surgery
Abstract
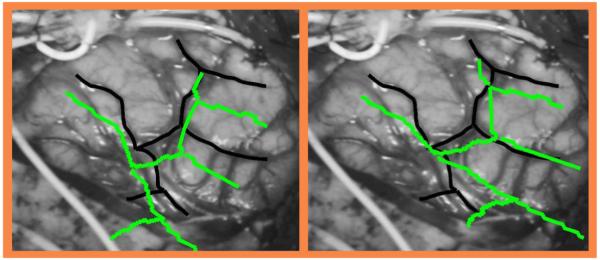
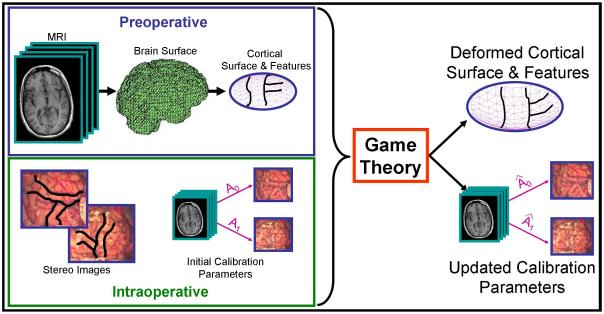
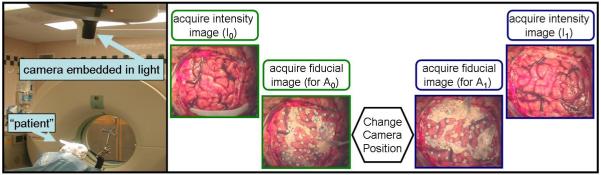
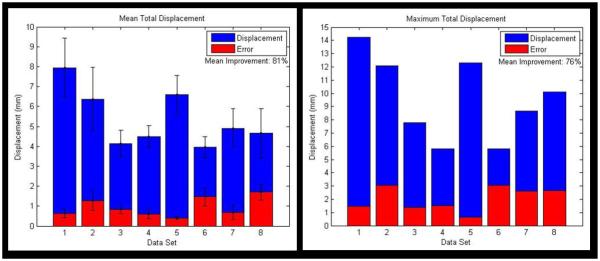
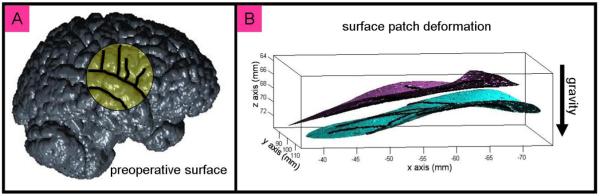
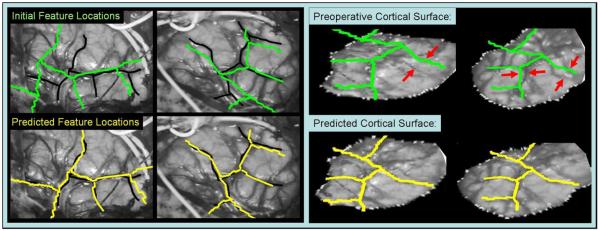
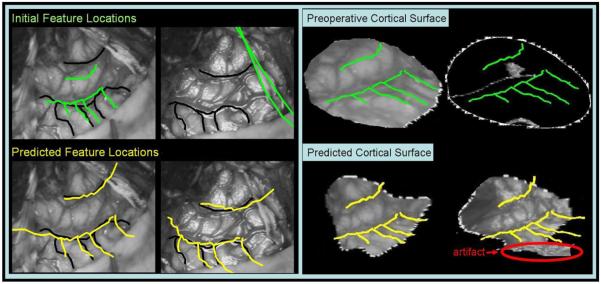
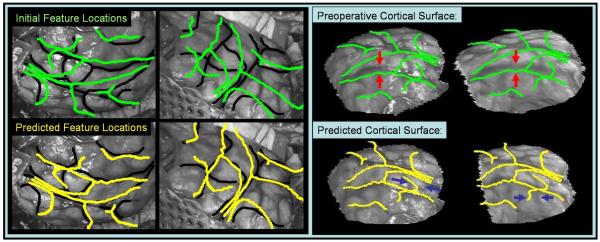
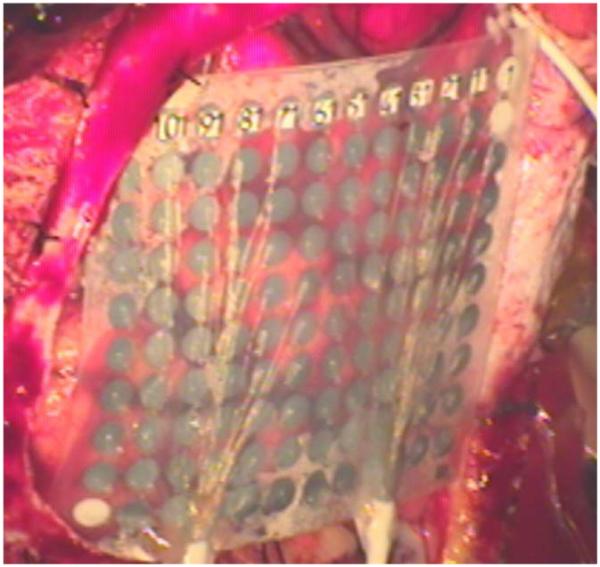
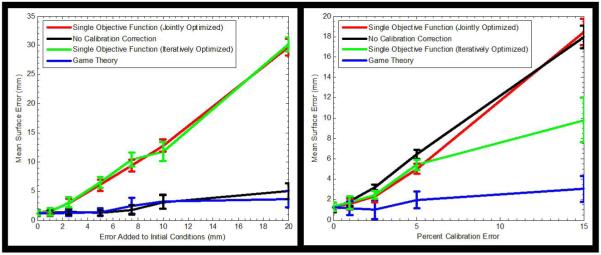
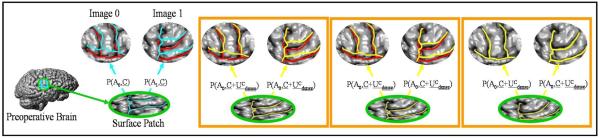
During neurosurgery, nonrigid brain deformation prevents preoperatively-acquired images from accurately depicting the intraoperative brain. Stereo vision systems can be used to track intraoperative cortical surface deformation and update preoperative brain images in conjunction with a biomechanical model. However, these stereo systems are often plagued with calibration error, which can corrupt the deformation estimation. In order to decouple the effects of camera calibration from the surface deformation estimation, a framework that can solve for disparate and often competing variables is needed. Game theory, which was developed to handle decision making in this type of competitive environment, has been applied to various fields from economics to biology. In this paper, game theory is applied to cortical surface tracking during neocortical epilepsy surgery and used to infer information about the physical processes of brain surface deformation and image acquisition. The method is successfully applied to eight in vivo cases, resulting in an 81% decrease in mean surface displacement error. This includes a case in which some of the initial camera calibration parameters had errors of 70%. Additionally, the advantages of using a game theoretic approach in neocortical epilepsy surgery are clearly demonstrated in its robustness to initial conditions.
Figures
Similar articles
-
Volumetric intraoperative brain deformation compensation: model development and phantom validation.IEEE Trans Med Imaging. 2012 Aug;31(8):1607-19. doi: 10.1109/TMI.2012.2197407. Epub 2012 May 2. IEEE Trans Med Imaging. 2012. PMID: 22562728 Free PMC article.
-
Nonrigid 3D brain registration using intensity/feature information.Med Image Comput Comput Assist Interv. 2006;9(Pt 1):932-9. doi: 10.1007/11866565_114. Med Image Comput Comput Assist Interv. 2006. PMID: 17354980 Free PMC article. Clinical Trial.
-
Persistent and automatic intraoperative 3D digitization of surfaces under dynamic magnifications of an operating microscope.Med Image Anal. 2015 Jan;19(1):30-45. doi: 10.1016/j.media.2014.07.004. Epub 2014 Aug 7. Med Image Anal. 2015. PMID: 25189364 Free PMC article.
-
Application of soft tissue modelling to image-guided surgery.Med Eng Phys. 2005 Dec;27(10):893-909. doi: 10.1016/j.medengphy.2005.10.005. Epub 2005 Nov 3. Med Eng Phys. 2005. PMID: 16271490 Review.
-
[Medical image analysis--image guided medicine].Fukuoka Igaku Zasshi. 2004 Nov;95(11):291-6. Fukuoka Igaku Zasshi. 2004. PMID: 15717495 Review. Japanese.
Cited by
-
Patient Registration Using Intraoperative Stereovision in Image-guided Open Spinal Surgery.IEEE Trans Biomed Eng. 2015 Sep;62(9):2177-86. doi: 10.1109/TBME.2015.2415731. Epub 2015 Mar 26. IEEE Trans Biomed Eng. 2015. PMID: 25826802 Free PMC article.
-
The game theory in thoracic surgery: from the intuitions of Luca Pacioli to the operating rooms management.J Thorac Dis. 2015 Nov;7(11):E526-30. doi: 10.3978/j.issn.2072-1439.2015.10.31. J Thorac Dis. 2015. PMID: 26716049 Free PMC article.
-
Computational Modeling for Enhancing Soft Tissue Image Guided Surgery: An Application in Neurosurgery.Ann Biomed Eng. 2016 Jan;44(1):128-38. doi: 10.1007/s10439-015-1433-1. Epub 2015 Sep 9. Ann Biomed Eng. 2016. PMID: 26354118 Free PMC article. Review.
-
Volumetric intraoperative brain deformation compensation: model development and phantom validation.IEEE Trans Med Imaging. 2012 Aug;31(8):1607-19. doi: 10.1109/TMI.2012.2197407. Epub 2012 May 2. IEEE Trans Med Imaging. 2012. PMID: 22562728 Free PMC article.
-
Automatic tracking of intraoperative brain surface displacements in brain tumor surgery.Annu Int Conf IEEE Eng Med Biol Soc. 2014;2014:1509-12. doi: 10.1109/EMBC.2014.6943888. Annu Int Conf IEEE Eng Med Biol Soc. 2014. PMID: 25570256 Free PMC article.
References
-
- Archip N, Fedorov A, Lloyd B, Chrisochoides N, Golby A, Black PM, Warfield SK. Integration of patient specific modeling and advanced image processing techniques for image-guided neurosurgery; Medical Imaging 2006: Visualization, Image-Guided Procedures, and Display, Proceedings of the SPIE; San Diego, CA. February 12-14 2006.pp. 422–429.
-
- Audette MA, Siddiqi K, Ferrie FP, Peters TM. An integrated range-sensing, segmentation and registration framework for the characterization of intra-surgical brain deformations in image-guided surgery. Computer Vision and Image Understanding. 2003 Feb;89(2-3):226–251.
-
- Başar T, Jan Olsder G. Dynamic Noncooperative Game Theory. 2nd Ed. Academic Press; New York: 1995.
-
- Baker S, Nayar SK. Parametric feature detection. International Journal of Computer Vision. 1998;27(1):27–50.
-
- Bates LM, Goerss SJ, Robb RA. A method for quantitative validation of image based correction for intraoperative brain shift; Medical Imaging 2000: Image Display and Visualization, Proceedings of the SPIE; San Diego, CA. February 13-15 2000.pp. 58–69.
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
