

Influence of bilateral vestibular loss on spinal stabilization in humans
- PMID: 20147413
- PMCID: PMC2853278
- DOI: 10.1152/jn.01064.2009
Influence of bilateral vestibular loss on spinal stabilization in humans
Abstract
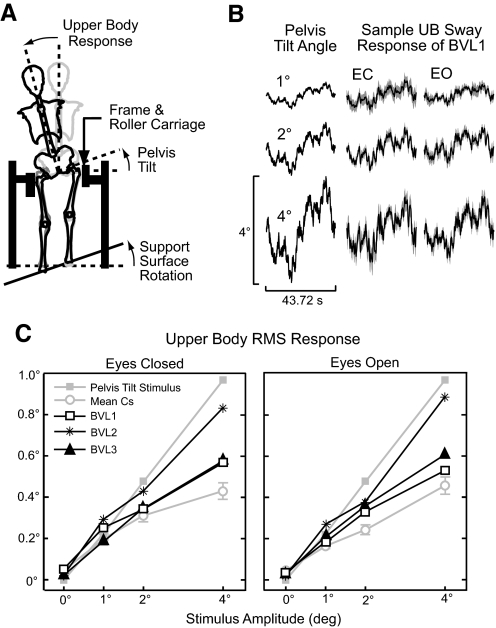
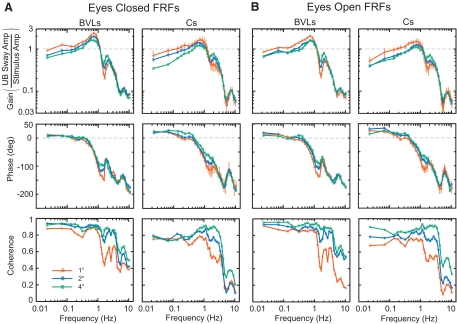
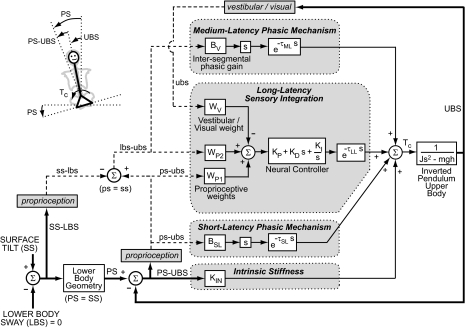
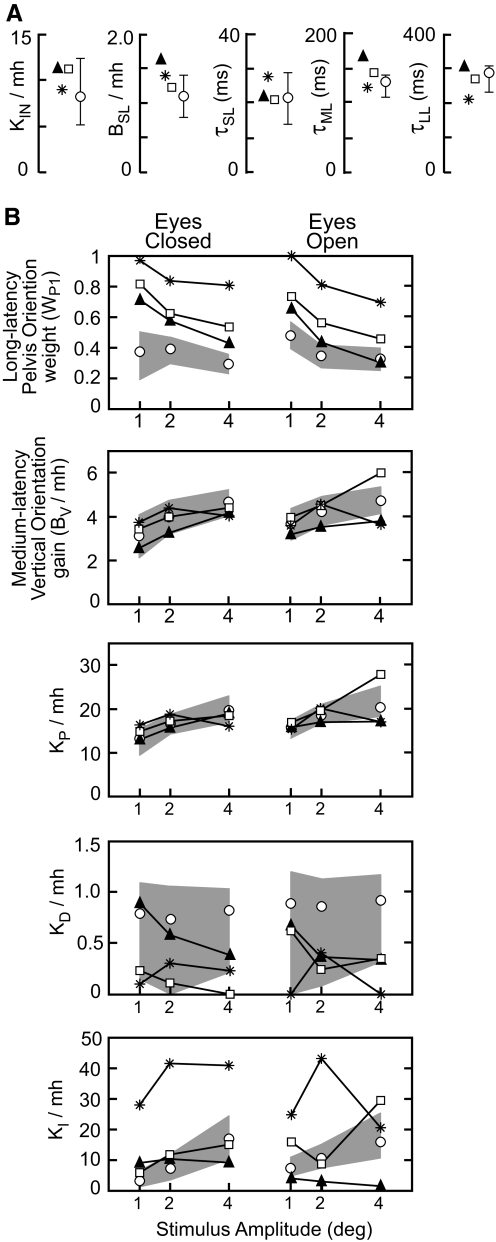
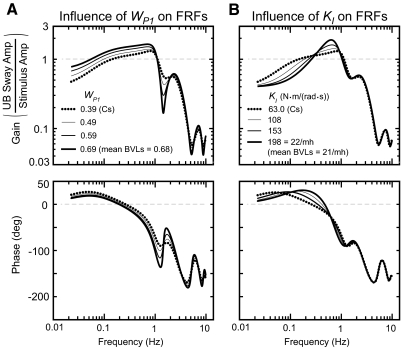
The control of upper body (UB) orientation relative to the pelvis in the frontal plane was characterized in bilateral vestibular loss subjects (BVLs) and compared with healthy control subjects (Cs). UB responses to external perturbations were evoked using continuous pelvis tilts (eyes open and eyes closed) at various amplitudes. Lateral sway of the lower body was prevented on all tests. UB sway was summarized using root-mean-square measures and dynamic behavior was characterized using frequency response functions (FRFs) from 0.023 to 10.3 Hz. Both subject groups had similar FRF variations as a function of stimulus frequency and were relatively unaffected by visual availability, indicating that visual orientation cues contributed very little to UB control. BVLs had larger UB sway at frequencies below ∼1 Hz compared with Cs. A feedback model of UB orientation control was used to identify sensory contributions to spinal stability and differences between subject groups. The model-based interpretation of experimental results indicated that a phasic proprioceptive signal encoding the angular velocity of UB relative to lower body motion was a major contributor to overall system damping. Parametric system identification showed that BVLs used proprioceptive information that oriented the UB toward the pelvis to a greater extent compared with Cs. Both subject groups used sensory information that oriented the UB vertical in space to a greater extent as pelvis tilt amplitudes increased. In BVLs, proprioceptive information signaling the UB orientation relative to the fixed lower body provided the vertical reference, whereas in Cs, vestibular information also contributed to the vertical reference.
Figures
References
-
- Bendat JS, Piersol AG. Random Data: Analysis and Measurement Procedures. New York: Wiley, 2000
-
- Brown SH, McGill SM. The intrinsic stiffness of the in vivo lumbar spine in response to quick releases: Implications for reflexive requirements. J Electromyogr Kinesiol 19: 727–736, 2009 - PubMed
-
- Carpenter MG, Allum JHJ, Honegger F. Vestibular influences on human postural control in combinations of pitch and roll planes reveal differences in spatiotemporal processing. Exp Brain Res 140: 95–111, 2001 - PubMed
-
- Cenciarini M, Peterka RJ. Stimulus-dependent changes in the vestibular contribution to human postural control. J Neurophysiol 95: 2733–2750, 2006 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Medical