

Noise and signal properties in PSF-based fully 3D PET image reconstruction: an experimental evaluation
- PMID: 20150683
- PMCID: PMC2890317
- DOI: 10.1088/0031-9155/55/5/013
Noise and signal properties in PSF-based fully 3D PET image reconstruction: an experimental evaluation
Abstract
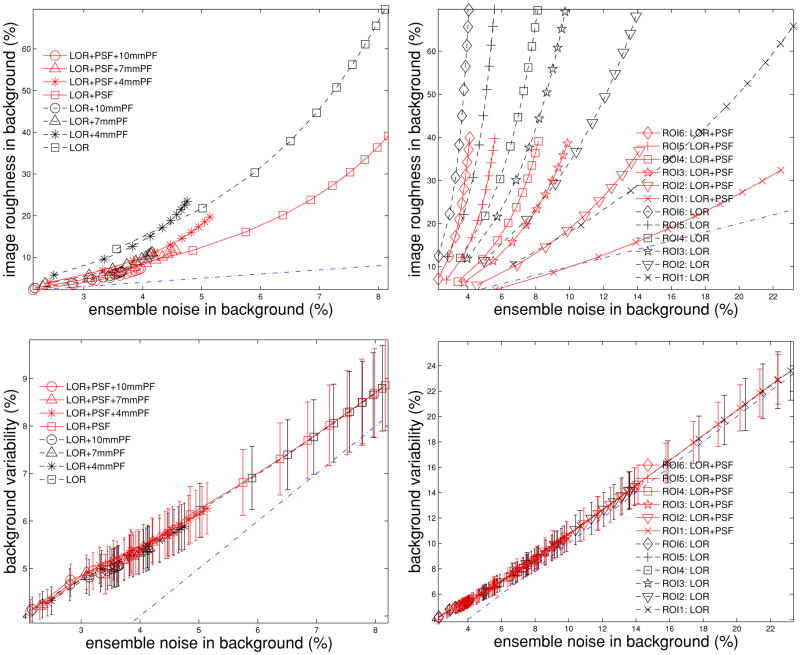
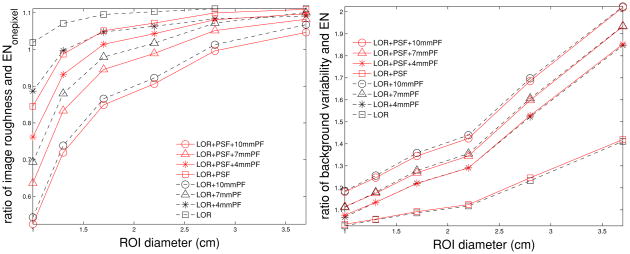
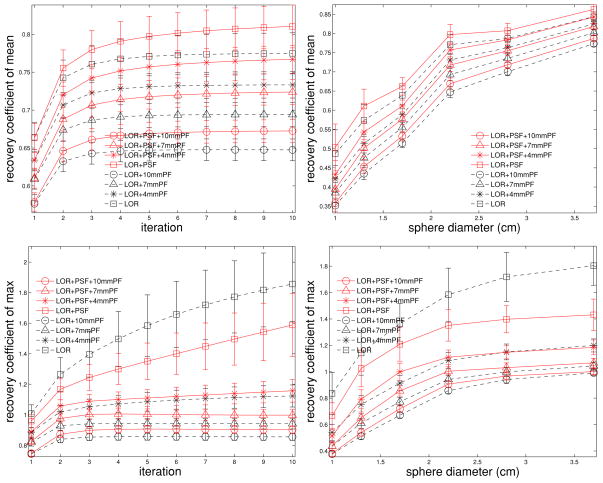
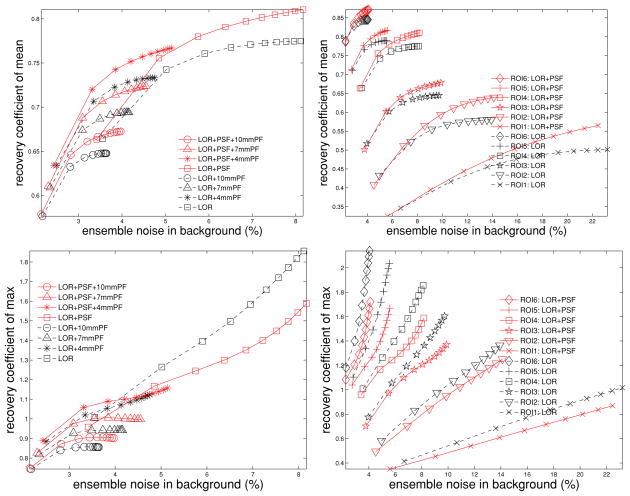
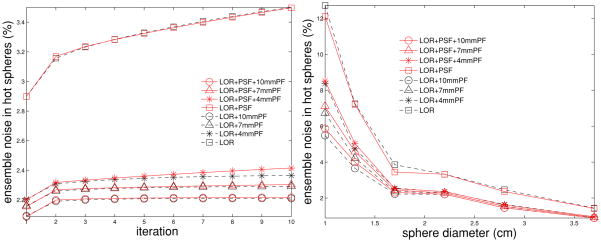
The addition of accurate system modeling in PET image reconstruction results in images with distinct noise texture and characteristics. In particular, the incorporation of point spread functions (PSF) into the system model has been shown to visually reduce image noise, but the noise properties have not been thoroughly studied. This work offers a systematic evaluation of noise and signal properties in different combinations of reconstruction methods and parameters. We evaluate two fully 3D PET reconstruction algorithms: (1) OSEM with exact scanner line of response modeled (OSEM+LOR), (2) OSEM with line of response and a measured point spread function incorporated (OSEM+LOR+PSF), in combination with the effects of four post-reconstruction filtering parameters and 1-10 iterations, representing a range of clinically acceptable settings. We used a modified NEMA image quality (IQ) phantom, which was filled with 68Ge and consisted of six hot spheres of different sizes with a target/background ratio of 4:1. The phantom was scanned 50 times in 3D mode on a clinical system to provide independent noise realizations. Data were reconstructed with OSEM+LOR and OSEM+LOR+PSF using different reconstruction parameters, and our implementations of the algorithms match the vendor's product algorithms. With access to multiple realizations, background noise characteristics were quantified with four metrics. Image roughness and the standard deviation image measured the pixel-to-pixel variation; background variability and ensemble noise quantified the region-to-region variation. Image roughness is the image noise perceived when viewing an individual image. At matched iterations, the addition of PSF leads to images with less noise defined as image roughness (reduced by 35% for unfiltered data) and as the standard deviation image, while it has no effect on background variability or ensemble noise. In terms of signal to noise performance, PSF-based reconstruction has a 7% improvement in contrast recovery at matched ensemble noise levels and 20% improvement of quantitation SNR in unfiltered data. In addition, the relations between different metrics are studied. A linear correlation is observed between background variability and ensemble noise for all different combinations of reconstruction methods and parameters, suggesting that background variability is a reasonable surrogate for ensemble noise when multiple realizations of scans are not available.
Figures







Similar articles
-
Evaluation of Noise Properties in PSF-Based PET Image Reconstruction.IEEE Nucl Sci Symp Conf Rec (1997). 2009 Oct 24;2009(2009):3042-3047. doi: 10.1109/nssmic.2009.5401574. IEEE Nucl Sci Symp Conf Rec (1997). 2009. PMID: 20495686 Free PMC article.
-
Phantom and Clinical Evaluation of the Bayesian Penalized Likelihood Reconstruction Algorithm Q.Clear on an LYSO PET/CT System.J Nucl Med. 2015 Sep;56(9):1447-52. doi: 10.2967/jnumed.115.159301. Epub 2015 Jul 9. J Nucl Med. 2015. PMID: 26159585 Free PMC article.
-
Optimizing scan time and bayesian penalized likelihood reconstruction algorithm in copper-64 PET/CT imaging: a phantom study.Biomed Phys Eng Express. 2024 May 14;10(4). doi: 10.1088/2057-1976/ad3e00. Biomed Phys Eng Express. 2024. PMID: 38608316
-
A GPU-accelerated fully 3D OSEM image reconstruction for a high-resolution small animal PET scanner using dual-ended readout detectors.Phys Med Biol. 2020 Dec 4;65(24):245007. doi: 10.1088/1361-6560/aba6f9. Phys Med Biol. 2020. PMID: 32679581
-
Improvement in PET/CT image quality with a combination of point-spread function and time-of-flight in relation to reconstruction parameters.J Nucl Med. 2012 Nov;53(11):1716-22. doi: 10.2967/jnumed.112.103861. Epub 2012 Sep 4. J Nucl Med. 2012. PMID: 22952340
Cited by
-
Modelling Random Coincidences in Positron Emission Tomography by Using Singles and Prompts: A Comparison Study.PLoS One. 2016 Sep 7;11(9):e0162096. doi: 10.1371/journal.pone.0162096. eCollection 2016. PLoS One. 2016. PMID: 27603143 Free PMC article.
-
Implementing the Point Spread Function Deconvolution for Better Molecular Characterization of Newly Diagnosed Gliomas: A Dynamic 18F-FDOPA PET Radiomics Study.Cancers (Basel). 2022 Nov 23;14(23):5765. doi: 10.3390/cancers14235765. Cancers (Basel). 2022. PMID: 36497245 Free PMC article.
-
Characteristics of Smoothing Filters to Achieve the Guideline Recommended Positron Emission Tomography Image without Harmonization.Asia Ocean J Nucl Med Biol. 2018 Winter;6(1):15-23. doi: 10.22038/aojnmb.2017.26684.1186. Asia Ocean J Nucl Med Biol. 2018. PMID: 29333463 Free PMC article.
-
Extended MRI-based PET motion correction for cardiac PET/MRI.EJNMMI Phys. 2024 Apr 6;11(1):36. doi: 10.1186/s40658-024-00637-z. EJNMMI Phys. 2024. PMID: 38581561 Free PMC article.
-
Sparsity promoting regularization for effective noise suppression in SPECT image reconstruction.Inverse Probl. 2019 Nov;35(11):115011. doi: 10.1088/1361-6420/ab23da. Epub 2019 Oct 4. Inverse Probl. 2019. PMID: 33603259 Free PMC article.
References
-
- Alessio AM, Kinahan PE, Harrison RL, Lewellen TK. IEEE Nucl. Sci. Symp. Conf. Record; Puerto Rico. 2005. pp. 1986–90.
-
- Alessio AM, Kinahan PE, Lewellen TK. IEEE Trans Med Imaging. 2006;25:828–37. - PubMed
-
- Barrett HH. J Opt Soc Am. 1990;7:1266–78. - PubMed
-
- Barrett HH, Wilson DW, Tsui BMW. Phys Med Biol. 1994;39:833–46. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources