

SLAM algorithm applied to robotics assistance for navigation in unknown environments
- PMID: 20163735
- PMCID: PMC2842281
- DOI: 10.1186/1743-0003-7-10
SLAM algorithm applied to robotics assistance for navigation in unknown environments
Abstract
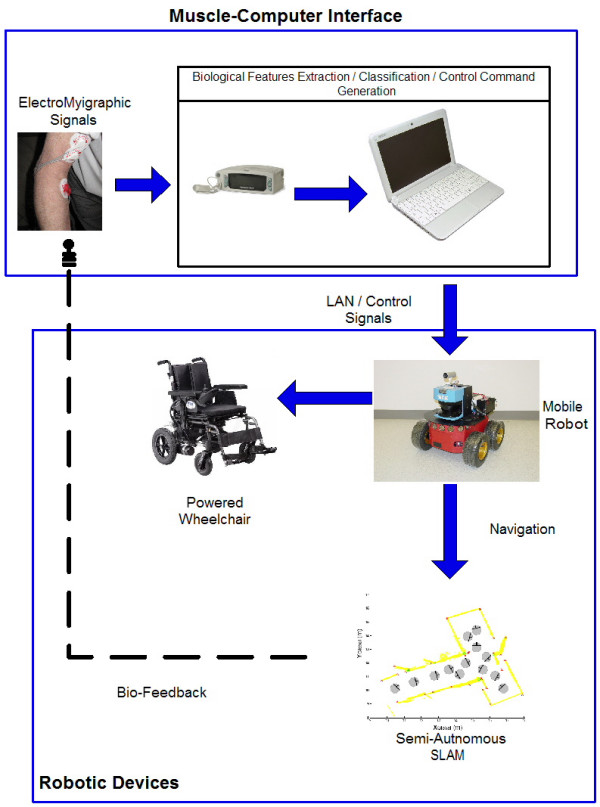
Background: The combination of robotic tools with assistance technology determines a slightly explored area of applications and advantages for disability or elder people in their daily tasks. Autonomous motorized wheelchair navigation inside an environment, behaviour based control of orthopaedic arms or user's preference learning from a friendly interface are some examples of this new field. In this paper, a Simultaneous Localization and Mapping (SLAM) algorithm is implemented to allow the environmental learning by a mobile robot while its navigation is governed by electromyographic signals. The entire system is part autonomous and part user-decision dependent (semi-autonomous). The environmental learning executed by the SLAM algorithm and the low level behaviour-based reactions of the mobile robot are robotic autonomous tasks, whereas the mobile robot navigation inside an environment is commanded by a Muscle-Computer Interface (MCI).
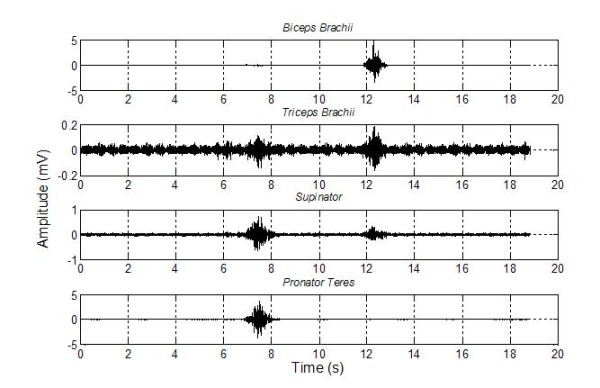
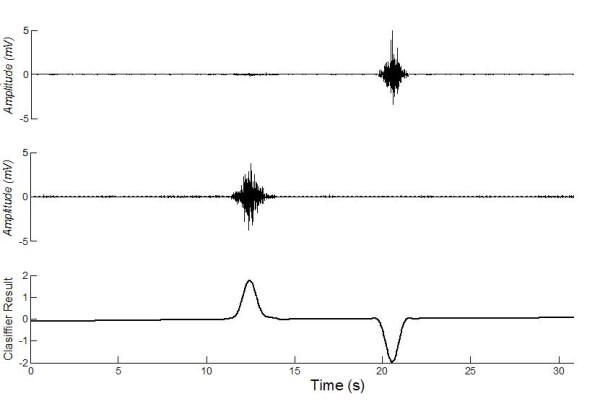
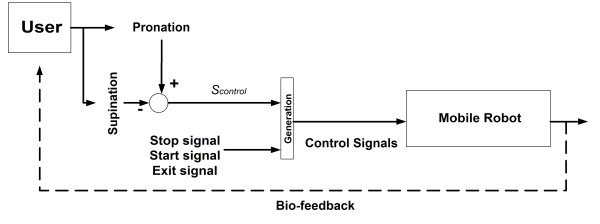
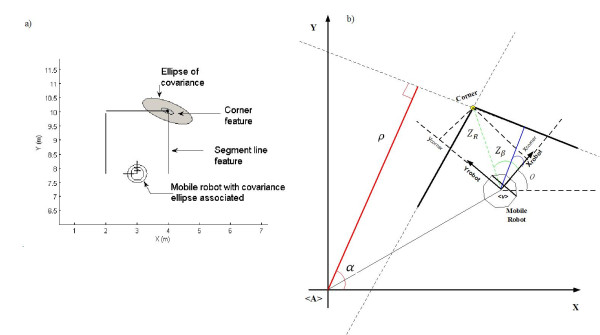
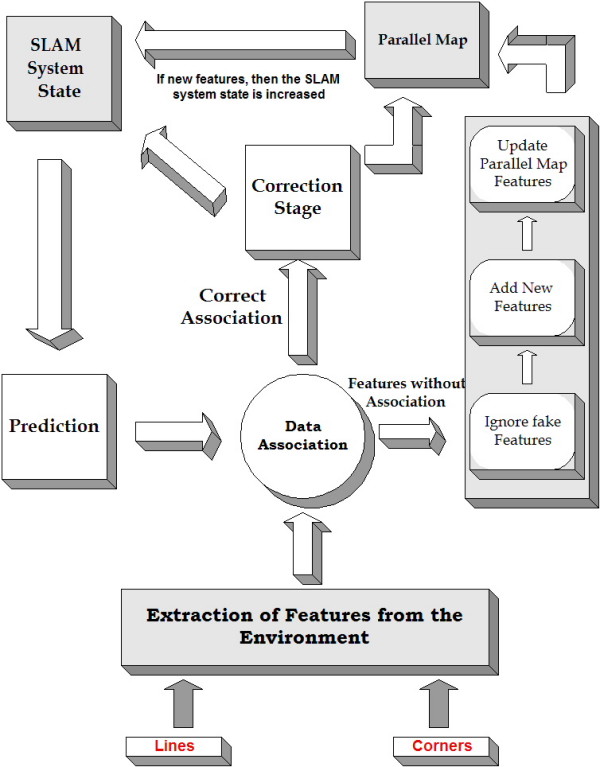
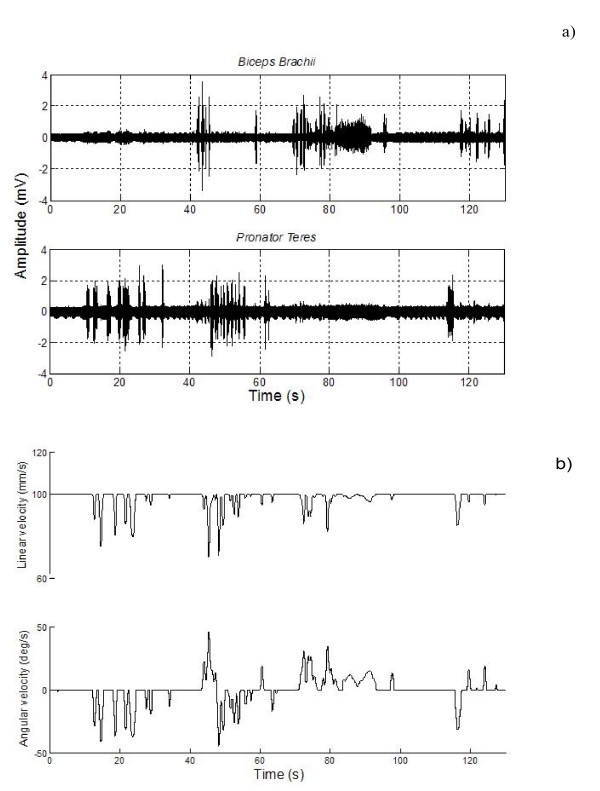
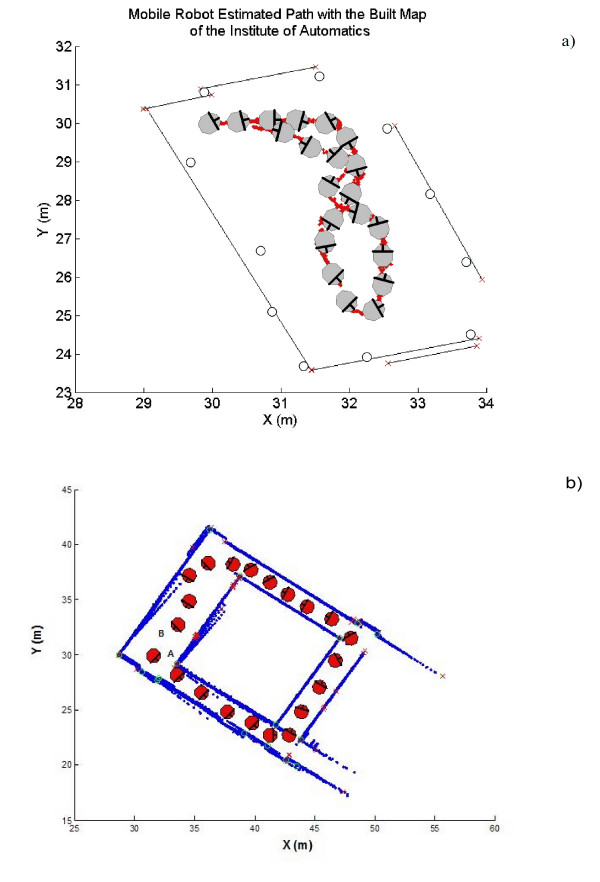
Methods: In this paper, a sequential Extended Kalman Filter (EKF) feature-based SLAM algorithm is implemented. The features correspond to lines and corners -concave and convex- of the environment. From the SLAM architecture, a global metric map of the environment is derived. The electromyographic signals that command the robot's movements can be adapted to the patient's disabilities. For mobile robot navigation purposes, five commands were obtained from the MCI: turn to the left, turn to the right, stop, start and exit. A kinematic controller to control the mobile robot was implemented. A low level behavior strategy was also implemented to avoid robot's collisions with the environment and moving agents.
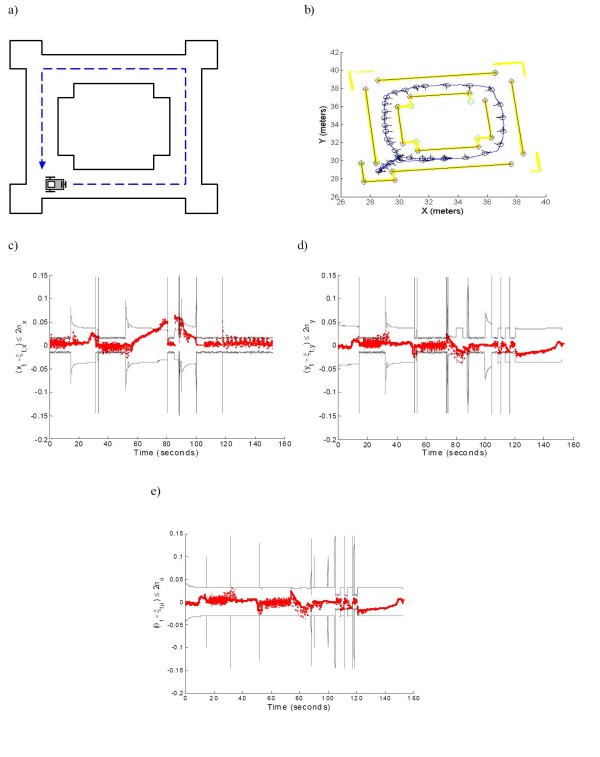
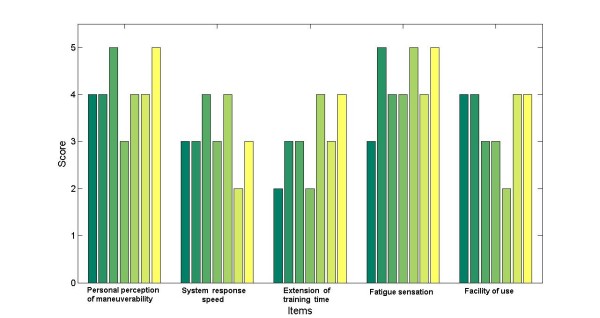
Results: The entire system was tested in a population of seven volunteers: three elder, two below-elbow amputees and two young normally limbed patients. The experiments were performed within a closed low dynamic environment. Subjects took an average time of 35 minutes to navigate the environment and to learn how to use the MCI. The SLAM results have shown a consistent reconstruction of the environment. The obtained map was stored inside the Muscle-Computer Interface.
Conclusions: The integration of a highly demanding processing algorithm (SLAM) with a MCI and the communication between both in real time have shown to be consistent and successful. The metric map generated by the mobile robot would allow possible future autonomous navigation without direct control of the user, whose function could be relegated to choose robot destinations. Also, the mobile robot shares the same kinematic model of a motorized wheelchair. This advantage can be exploited for wheelchair autonomous navigation.
Figures
Similar articles
-
Autonomous assistance navigation for robotic wheelchairs in confined spaces.Annu Int Conf IEEE Eng Med Biol Soc. 2010;2010:503-6. doi: 10.1109/IEMBS.2010.5625976. Annu Int Conf IEEE Eng Med Biol Soc. 2010. PMID: 21095654
-
Autonomous Navigation System of Greenhouse Mobile Robot Based on 3D Lidar and 2D Lidar SLAM.Front Plant Sci. 2022 Mar 10;13:815218. doi: 10.3389/fpls.2022.815218. eCollection 2022. Front Plant Sci. 2022. PMID: 35360319 Free PMC article.
-
Research and Implementation of Autonomous Navigation for Mobile Robots Based on SLAM Algorithm under ROS.Sensors (Basel). 2022 May 31;22(11):4172. doi: 10.3390/s22114172. Sensors (Basel). 2022. PMID: 35684793 Free PMC article.
-
A Review on Visual-SLAM: Advancements from Geometric Modelling to Learning-Based Semantic Scene Understanding Using Multi-Modal Sensor Fusion.Sensors (Basel). 2022 Sep 25;22(19):7265. doi: 10.3390/s22197265. Sensors (Basel). 2022. PMID: 36236364 Free PMC article. Review.
-
Model learning for robot control: a survey.Cogn Process. 2011 Nov;12(4):319-40. doi: 10.1007/s10339-011-0404-1. Epub 2011 Apr 13. Cogn Process. 2011. PMID: 21487784 Review.
Cited by
-
Robust human machine interface based on head movements applied to assistive robotics.ScientificWorldJournal. 2013 Dec 26;2013:589636. doi: 10.1155/2013/589636. eCollection 2013. ScientificWorldJournal. 2013. PMID: 24453877 Free PMC article.
-
Augmented Reality (AR) for Surgical Robotic and Autonomous Systems: State of the Art, Challenges, and Solutions.Sensors (Basel). 2023 Jul 6;23(13):6202. doi: 10.3390/s23136202. Sensors (Basel). 2023. PMID: 37448050 Free PMC article.
References
-
- Smith R, Self M, Cheeseman P. Estimating uncertain spatial relationships in robotics. Autonomous Robot Vehicles. 1980. pp. 167–193.
-
- Guivant JE, Nebot ME. Optimization of the simultaneous localization and map-building algorithm for real-time implementation. IEEE Transactions on Robotics and Automation. 2001;17:242–257. doi: 10.1109/70.938382. - DOI
-
- Hähnel D, Fox D, Burgard W, Thrun S. A highly efficient FastSLAM algorithm for generating maps of large-scale cyclic environments from raw laser range measurements. Proc of the Conference on Intelligent Robots and Systems (IROS) 2003.
-
- Paz LM, Pimies P, Tardos JD, Neira J. Large Scale 6DOF SLAM with stereo-in-hand. IEEE Transactions on Robotics. 2008;5:929–931.
-
- Thrun S, Burgard W, Fox D. A probabilistic approach to concurrent mapping and localization for mobile robots. Machine Learning. 1998;31:29–53. doi: 10.1023/A:1007436523611. - DOI
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
