

Multiple motor learning strategies in visuomotor rotation
- PMID: 20195373
- PMCID: PMC2827554
- DOI: 10.1371/journal.pone.0009399
Multiple motor learning strategies in visuomotor rotation
Abstract
Background: When exposed to a continuous directional discrepancy between movements of a visible hand cursor and the actual hand (visuomotor rotation), subjects adapt their reaching movements so that the cursor is brought to the target. Abrupt removal of the discrepancy after training induces reaching error in the direction opposite to the original discrepancy, which is called an aftereffect. Previous studies have shown that training with gradually increasing visuomotor rotation results in a larger aftereffect than with a suddenly increasing one. Although the aftereffect difference implies a difference in the learning process, it is still unclear whether the learned visuomotor transformations are qualitatively different between the training conditions.
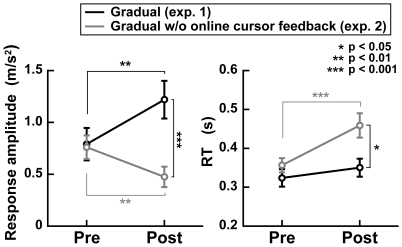
Methodology/principal findings: We examined the qualitative changes in the visuomotor transformation after the learning of the sudden and gradual visuomotor rotations. The learning of the sudden rotation led to a significant increase of the reaction time for arm movement initiation and then the reaching error decreased, indicating that the learning is associated with an increase of computational load in motor preparation (planning). In contrast, the learning of the gradual rotation did not change the reaction time but resulted in an increase of the gain of feedback control, suggesting that the online adjustment of the reaching contributes to the learning of the gradual rotation. When the online cursor feedback was eliminated during the learning of the gradual rotation, the reaction time increased, indicating that additional computations are involved in the learning of the gradual rotation.
Conclusions/significance: The results suggest that the change in the motor planning and online feedback adjustment of the movement are involved in the learning of the visuomotor rotation. The contributions of those computations to the learning are flexibly modulated according to the visual environment. Such multiple learning strategies would be required for reaching adaptation within a short training period.
Conflict of interest statement
Figures
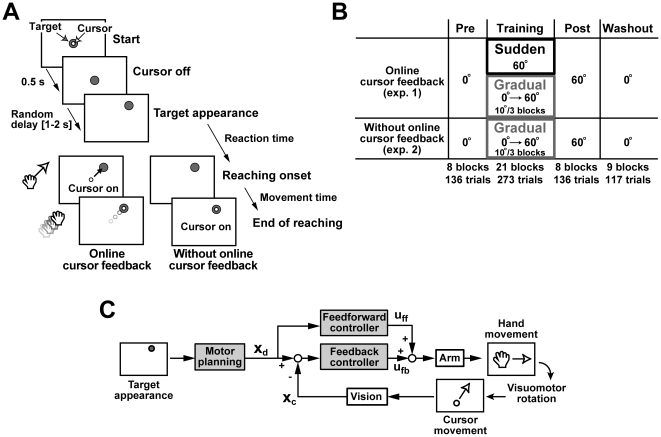
 represents desired movement of the arm,
represents desired movement of the arm,  indicates feedback information of current movement, and
indicates feedback information of current movement, and  and
and  indicate feedforward and feedback motor commands, respectively. This scheme assumes that target presentation triggers the motor planning and that the feedforward controller transforms the desired movement into motor commands. The manipulandum system converts the hand movement into cursor movement in the rotationally biased direction on the screen. The feedback controller adjusts the ongoing movement using the feedback information of the cursor movement.
indicate feedforward and feedback motor commands, respectively. This scheme assumes that target presentation triggers the motor planning and that the feedforward controller transforms the desired movement into motor commands. The manipulandum system converts the hand movement into cursor movement in the rotationally biased direction on the screen. The feedback controller adjusts the ongoing movement using the feedback information of the cursor movement.
Similar articles
-
Effect of visuomotor-map uncertainty on visuomotor adaptation.J Neurophysiol. 2012 Mar;107(6):1576-85. doi: 10.1152/jn.00204.2011. Epub 2011 Dec 21. J Neurophysiol. 2012. PMID: 22190631
-
Eye-Hand Coordination during Visuomotor Adaptation with Different Rotation Angles: Effects of Terminal Visual Feedback.PLoS One. 2016 Nov 3;11(11):e0164602. doi: 10.1371/journal.pone.0164602. eCollection 2016. PLoS One. 2016. PMID: 27812093 Free PMC article.
-
Learning of visuomotor transformations for vectorial planning of reaching trajectories.J Neurosci. 2000 Dec 1;20(23):8916-24. doi: 10.1523/JNEUROSCI.20-23-08916.2000. J Neurosci. 2000. PMID: 11102502 Free PMC article. Clinical Trial.
-
Mirror reversal and visual rotation are learned and consolidated via separate mechanisms: recalibrating or learning de novo?J Neurosci. 2014 Oct 8;34(41):13768-79. doi: 10.1523/JNEUROSCI.5306-13.2014. J Neurosci. 2014. PMID: 25297103 Free PMC article.
-
Motor learning and consolidation: the case of visuomotor rotation.Adv Exp Med Biol. 2009;629:405-21. doi: 10.1007/978-0-387-77064-2_21. Adv Exp Med Biol. 2009. PMID: 19227512 Free PMC article. Review.
Cited by
-
The effects of acute exercise on visuomotor adaptation, learning, and inter-limb transfer.Exp Brain Res. 2019 Apr;237(4):1109-1127. doi: 10.1007/s00221-019-05491-5. Epub 2019 Feb 18. Exp Brain Res. 2019. PMID: 30778618
-
Age-related variations of visuo-motor adaptation beyond explicit knowledge.Front Aging Neurosci. 2014 Jul 4;6:152. doi: 10.3389/fnagi.2014.00152. eCollection 2014. Front Aging Neurosci. 2014. PMID: 25071561 Free PMC article.
-
The influence of movement preparation time on the expression of visuomotor learning and savings.J Neurosci. 2015 Apr 1;35(13):5109-17. doi: 10.1523/JNEUROSCI.3869-14.2015. J Neurosci. 2015. PMID: 25834038 Free PMC article.
-
Context-dependent generalization.Front Hum Neurosci. 2013 May 6;7:171. doi: 10.3389/fnhum.2013.00171. eCollection 2013. Front Hum Neurosci. 2013. PMID: 23653603 Free PMC article.
-
Environmental experience within and across testing days determines the strength of human visuomotor adaptation.Exp Brain Res. 2012 Feb;216(3):409-18. doi: 10.1007/s00221-011-2945-z. Epub 2011 Dec 6. Exp Brain Res. 2012. PMID: 22143868
References
-
- Cunningham HA. Aiming error under transformed spatial mappings suggests a structure for visual-motor maps. J Exp Psychol Hum Percept Perform. 1989;15:493–506. - PubMed
-
- Imamizu H, Uno Y, Kawato M. Internal representations of the motor apparatus: implications from generalization in visuomotor learning. J Exp Psychol Hum Percept Perform. 1995;21:1174–1198. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
