

Real-time decision fusion for multimodal neural prosthetic devices
- PMID: 20209151
- PMCID: PMC2830464
- DOI: 10.1371/journal.pone.0009493
Real-time decision fusion for multimodal neural prosthetic devices
Abstract
Background: The field of neural prosthetics aims to develop prosthetic limbs with a brain-computer interface (BCI) through which neural activity is decoded into movements. A natural extension of current research is the incorporation of neural activity from multiple modalities to more accurately estimate the user's intent. The challenge remains how to appropriately combine this information in real-time for a neural prosthetic device.
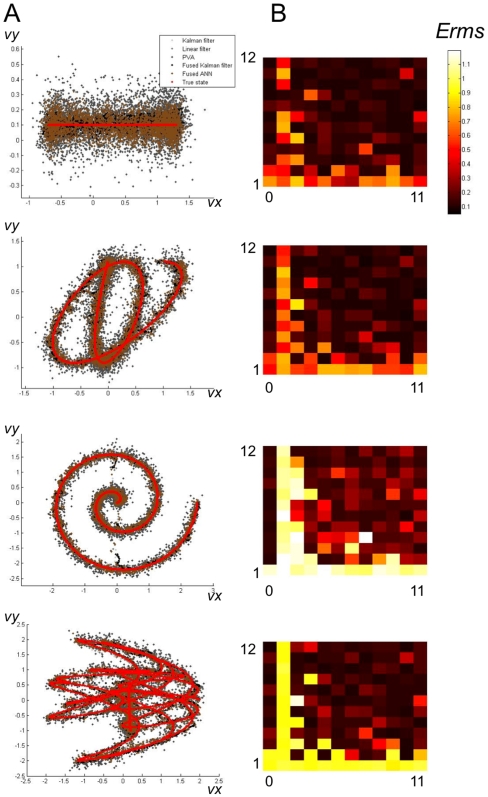
Methodology/principal findings: Here we propose a framework based on decision fusion, i.e., fusing predictions from several single-modality decoders to produce a more accurate device state estimate. We examine two algorithms for continuous variable decision fusion: the Kalman filter and artificial neural networks (ANNs). Using simulated cortical neural spike signals, we implemented several successful individual neural decoding algorithms, and tested the capabilities of each fusion method in the context of decoding 2-dimensional endpoint trajectories of a neural prosthetic arm. Extensively testing these methods on random trajectories, we find that on average both the Kalman filter and ANNs successfully fuse the individual decoder estimates to produce more accurate predictions.
Conclusions: Our results reveal that a fusion-based approach has the potential to improve prediction accuracy over individual decoders of varying quality, and we hope that this work will encourage multimodal neural prosthetics experiments in the future.
Conflict of interest statement
Figures




References
-
- Dillingham TR, Pezzin LE, MacKenzie EJ. Limb amputation and limb deficiency: epidemiology and recent trends in the United States. South Med J. 2002;95:875–883. - PubMed
-
- Ziegler-Graham K, MacKenzie EJ, Ephraim PL, Travison TG, Brookmeyer R. Estimating the prevalence of limb loss in the United States: 2005 to 2050. Arch Phys Med Rehabil. 2008;89:422–429. - PubMed
-
- Nawrot MP, Boucsein C, Rodriguez Molina V, Riehle A, Aertsen A, et al. Measurement of variability dynamics in cortical spike trains. J Neurosci Methods. 2008;169:374–390. - PubMed
-
- Banerjee A, Series P, Pouget A. Dynamical constraints on using precise spike timing to compute in recurrent cortical networks. Neural Comput. 2008;20:974–993. - PubMed
-
- Scherberger H, Jarvis MR, Andersen RA. Cortical local field potential encodes movement intentions in the posterior parietal cortex. Neuron. 2005;46:347–354. - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
