

Two explanations for the compliant running paradox: reduced work of bouncing viscera and increased stability in uneven terrain
- PMID: 20335198
- PMCID: PMC2880072
- DOI: 10.1098/rsbl.2010.0175
Two explanations for the compliant running paradox: reduced work of bouncing viscera and increased stability in uneven terrain
Abstract
Economy is a central principle for understanding animal locomotion. Yet, compared with theoretical predictions concerning economy, animals run with compliant legs that are energetically costly. Here, we address this apparent paradox, highlighting two factors that predict benefits for compliant gaits: (i) minimizing cost of work associated with bouncing viscera; and (ii) leg control for robust stability in uneven terrain. We show that consideration of the effects of bouncing viscera predicts an energetic optimum for relatively compliant legs. To compare stability in uneven terrain, we introduce the normalized maximum drop (NMD), a measure based on simple kinematics, which predicts that compliant legs allow negotiation of relatively larger terrain perturbations without failure. Our model also suggests an inherent trade-off in control of leg retraction velocity (omega) for stability: low omega allows higher NMD, reducing fall risk, whereas high omega minimizes peak forces with terrain drops, reducing injury risk. Optimization for one of these factors explicitly limits the other; however, compliant legs relax this trade-off, allowing greater stability by both measures. Our models suggest compromises in leg control for economy and stability that might explain why animals run with compliant legs.
Figures
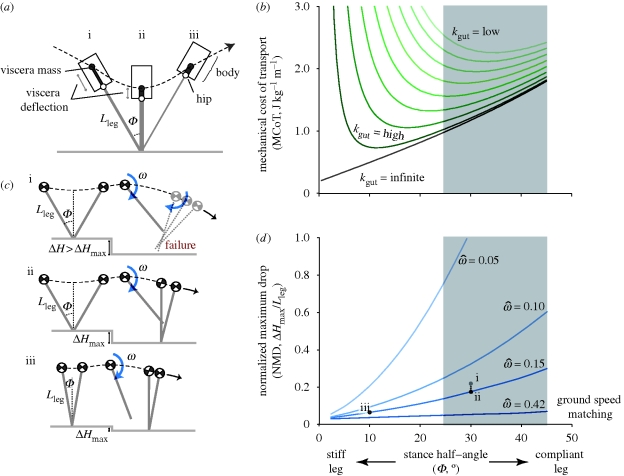
 , shown as dimensionless
, shown as dimensionless  ) compliant legs ((ii) in c,d) have higher NMD than stiff legs ((iii) in c,d). Grey box in (b,d) indicates approximate Φ range used by animals (Farley et al. 1993).
) compliant legs ((ii) in c,d) have higher NMD than stiff legs ((iii) in c,d). Grey box in (b,d) indicates approximate Φ range used by animals (Farley et al. 1993).Similar articles
-
Understanding the Agility of Running Birds: Sensorimotor and Mechanical Factors in Avian Bipedal Locomotion.Integr Comp Biol. 2018 Nov 1;58(5):884-893. doi: 10.1093/icb/icy058. Integr Comp Biol. 2018. PMID: 29897448 Free PMC article. Review.
-
Small vertebrates running on uneven terrain: a biomechanical study of two differently specialised lacertid lizards.Sci Rep. 2019 Nov 14;9(1):16858. doi: 10.1038/s41598-019-53329-5. Sci Rep. 2019. PMID: 31727966 Free PMC article.
-
Swing-leg trajectory of running guinea fowl suggests task-level priority of force regulation rather than disturbance rejection.PLoS One. 2014 Jun 30;9(6):e100399. doi: 10.1371/journal.pone.0100399. eCollection 2014. PLoS One. 2014. PMID: 24979750 Free PMC article.
-
Biomechanics and energetics of running on uneven terrain.J Exp Biol. 2015 Mar;218(Pt 5):711-9. doi: 10.1242/jeb.106518. Epub 2015 Jan 23. J Exp Biol. 2015. PMID: 25617451
-
Optimization of structure and movement of the legs of animals.J Biomech. 1993;26 Suppl 1:1-6. doi: 10.1016/0021-9290(93)90075-p. J Biomech. 1993. PMID: 8505345 Review.
Cited by
-
Development of VariLeg, an exoskeleton with variable stiffness actuation: first results and user evaluation from the CYBATHLON 2016.J Neuroeng Rehabil. 2018 Mar 13;15(1):18. doi: 10.1186/s12984-018-0360-4. J Neuroeng Rehabil. 2018. PMID: 29534730 Free PMC article.
-
Understanding the Agility of Running Birds: Sensorimotor and Mechanical Factors in Avian Bipedal Locomotion.Integr Comp Biol. 2018 Nov 1;58(5):884-893. doi: 10.1093/icb/icy058. Integr Comp Biol. 2018. PMID: 29897448 Free PMC article. Review.
-
Challenging human locomotion: stability and modular organisation in unsteady conditions.Sci Rep. 2018 Feb 9;8(1):2740. doi: 10.1038/s41598-018-21018-4. Sci Rep. 2018. PMID: 29426876 Free PMC article.
-
Limb, joint and pelvic kinematic control in the quail coping with steps upwards and downwards.Sci Rep. 2022 Sep 23;12(1):15901. doi: 10.1038/s41598-022-20247-y. Sci Rep. 2022. PMID: 36151454 Free PMC article.
-
Musculoskeletal modelling of an ostrich (Struthio camelus) pelvic limb: influence of limb orientation on muscular capacity during locomotion.PeerJ. 2015 Jun 11;3:e1001. doi: 10.7717/peerj.1001. eCollection 2015. PeerJ. 2015. PMID: 26082859 Free PMC article.
References
-
- Alexander R. M.1992A model of bipedal locomotion on compliant legs. Phil. Trans. R. Soc. Lond. B 338, 189–198 (doi:10.1098/rstb.1992.0138) - DOI - PubMed
-
- Bertram J. E. A., Ruina A.2001Multiple walking speed-frequency relations are predicted by constrained optimization. J. Theor. Biol. 209, 445–453 (doi:10.1006/jtbi.2001.2279) - DOI - PubMed
-
- Biewener A. A.1989Scaling body support in mammals: limb posture and muscle mechanics. Science 245, 45–48 (doi:10.1126/science.2740914) - DOI - PubMed
-
- Blum Y., Birn-Jeffery A. V., Daley M. A., Seyfarth A.2010Does a crouched leg posture enhance running stability? In Proc. of the 16th USNCTAM PA, USA: State College - PubMed
-
- Cavagna G. A., Heglund N. C., Taylor C. R.1977Mechanical work in terrestrial locomotion: two basic mechanisms for minimizing energy expenditure. Am. J. Physiol. 233, R243–R261 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
