

Finger interaction in a three-dimensional pressing task
- PMID: 20336281
- PMCID: PMC2936772
- DOI: 10.1007/s00221-010-2213-7
Finger interaction in a three-dimensional pressing task
Abstract
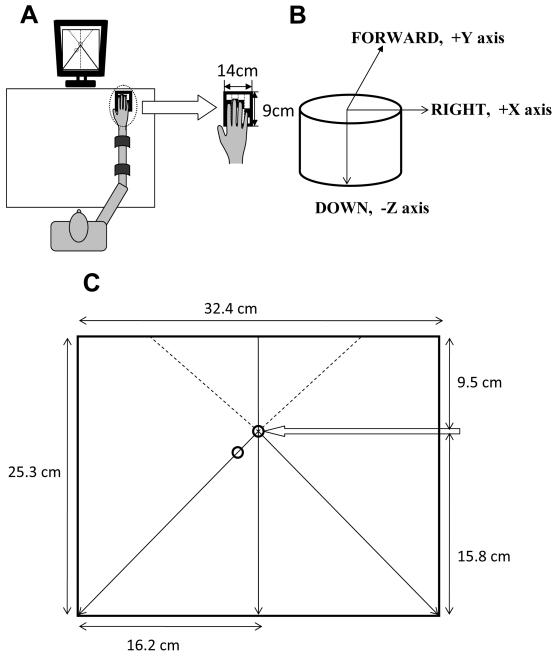
Accurate control of forces produced by the fingers is essential for performing object manipulation. This study examines the indices of finger interaction when accurate time profiles of force are produced in different directions, while using one of the fingers or all four fingers of the hand. We hypothesized that patterns of unintended force production among shear force components may involve features not observed in the earlier studies of vertical force production. In particular, we expected to see unintended forces generated by non-task fingers not in the direction of the instructed force but in the opposite direction as well as substantial force production in directions orthogonal to the instructed direction. We also tested a hypothesis that multi-finger synergies, quantified using the framework of the uncontrolled manifold hypothesis, will help reduce across-trials variance of both total force magnitude and direction. Young, healthy subjects were required to produce accurate ramps of force in five different directions by pressing on force sensors with the fingers of the right (dominant) hand. The index finger induced the smallest unintended forces in non-task fingers. The little finger showed the smallest unintended forces when it was a non-task finger. Task fingers showed substantial force production in directions orthogonal to the intended force direction. During four-finger tasks, individual force vectors typically pointed off the task direction, with these deviations nearly perfectly matched to produce a resultant force in the task direction. Multi-finger synergy indices reflected strong co-variation in the space of finger modes (commands to fingers) that reduced variability of the total force magnitude and direction across trials. The synergy indices increased in magnitude over the first 30% of the trial time and then stayed at a nearly constant level. The synergy index for stabilization of total force magnitude was higher for shear force components when compared to the downward pressing force component. The results suggest complex interactions between enslaving and synergic force adjustments, possibly reflecting the experience with everyday prehensile tasks. For the first time, the data document multi-finger synergies stabilizing both shear force magnitude and force vector direction. These synergies may play a major role in stabilizing the hand action during object manipulation.
Figures









Similar articles
-
The synergic control of multi-finger force production: stability of explicit and implicit task components.Exp Brain Res. 2017 Jan;235(1):1-14. doi: 10.1007/s00221-016-4768-4. Epub 2016 Sep 6. Exp Brain Res. 2017. PMID: 27601252 Free PMC article.
-
Learning multi-finger synergies: an uncontrolled manifold analysis.Exp Brain Res. 2004 Aug;157(3):336-50. doi: 10.1007/s00221-004-1850-0. Epub 2004 Mar 20. Exp Brain Res. 2004. PMID: 15042264
-
Accurate production of time-varying patterns of the moment of force in multi-finger tasks.Exp Brain Res. 2006 Oct;175(1):68-82. doi: 10.1007/s00221-006-0521-8. Epub 2006 May 24. Exp Brain Res. 2006. PMID: 16779549 Free PMC article.
-
Age-related changes in optimality and motor variability: an example of multifinger redundant tasks.Exp Brain Res. 2011 Jul;212(1):1-18. doi: 10.1007/s00221-011-2692-1. Epub 2011 Apr 26. Exp Brain Res. 2011. PMID: 21519912 Free PMC article.
-
Multi-finger prehension: control of a redundant mechanical system.Adv Exp Med Biol. 2009;629:597-618. doi: 10.1007/978-0-387-77064-2_32. Adv Exp Med Biol. 2009. PMID: 19227523 Review.
Cited by
-
Age-related changes in the control of finger force vectors.J Appl Physiol (1985). 2010 Dec;109(6):1827-41. doi: 10.1152/japplphysiol.00430.2010. Epub 2010 Sep 9. J Appl Physiol (1985). 2010. PMID: 20829494 Free PMC article.
-
Stability of steady hand force production explored across spaces and methods of analysis.Exp Brain Res. 2018 Jun;236(6):1545-1562. doi: 10.1007/s00221-018-5238-y. Epub 2018 Mar 22. Exp Brain Res. 2018. PMID: 29564506 Free PMC article.
-
Forces and moments generated by the human arm: variability and control.Exp Brain Res. 2012 Nov;223(2):159-75. doi: 10.1007/s00221-012-3235-0. Epub 2012 Sep 28. Exp Brain Res. 2012. PMID: 23080084 Free PMC article.
-
Age-related changes to motor synergies in multi-joint and multi-finger manipulative skills: a meta-analysis.Eur J Appl Physiol. 2019 Oct;119(10):2349-2362. doi: 10.1007/s00421-019-04216-4. Epub 2019 Aug 31. Eur J Appl Physiol. 2019. PMID: 31473806 Free PMC article.
-
Stabilization of cat paw trajectory during locomotion.J Neurophysiol. 2014 Sep 15;112(6):1376-91. doi: 10.1152/jn.00663.2013. Epub 2014 Jun 3. J Neurophysiol. 2014. PMID: 24899676 Free PMC article.
References
-
- Danion F, Schöner G, Latash ML, Li S, Scholz JP, Zatsiorsky VM. A force mode hypothesis for finger interaction during multi-finger force production tasks. Biol Cybern. 2003;88:91–98. - PubMed
-
- de Freitas PB, Jaric S. Force coordination in static manipulation tasks performed using standard and non-standard grasping techniques. Exp Brain Res. 2009;194:605–618. - PubMed
-
- Flanagan JR, Wing AM. Modulation of grip force with load force during point-to-point arm movements. Exp Brain Res. 1993;95:131–143. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
