

Muscle moment arms of the gibbon hind limb: implications for hylobatid locomotion
- PMID: 20447251
- PMCID: PMC2849522
- DOI: 10.1111/j.1469-7580.2009.01209.x
Muscle moment arms of the gibbon hind limb: implications for hylobatid locomotion
Abstract
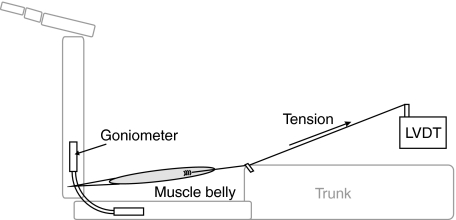
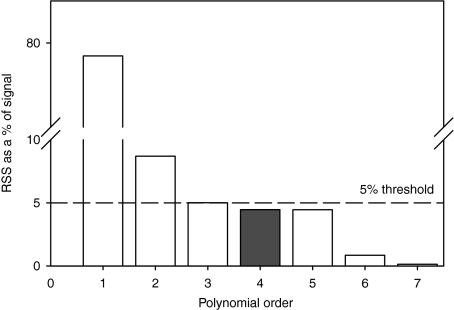
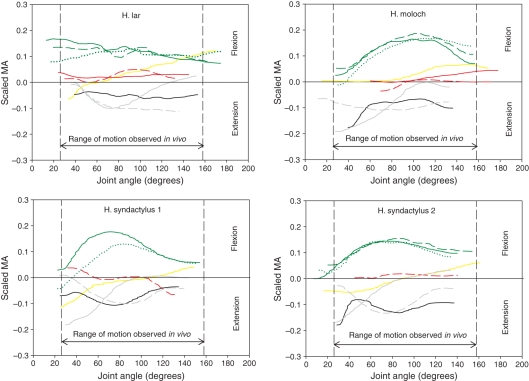
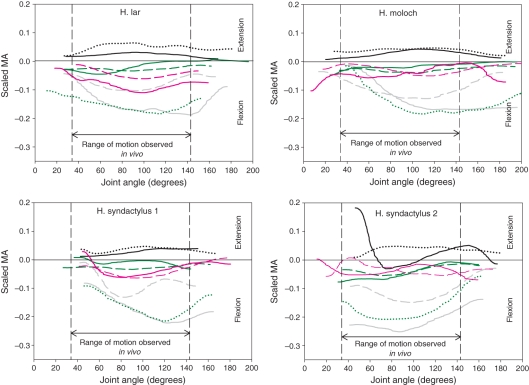
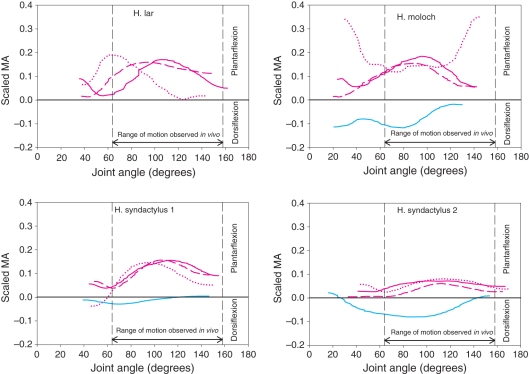
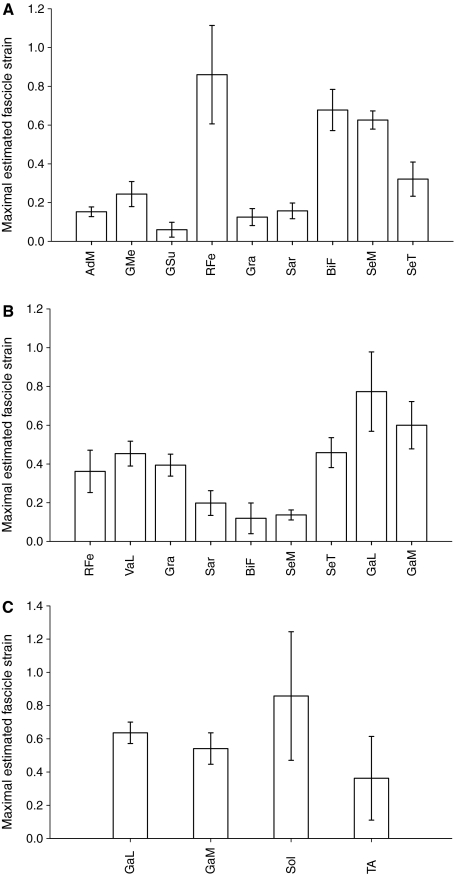
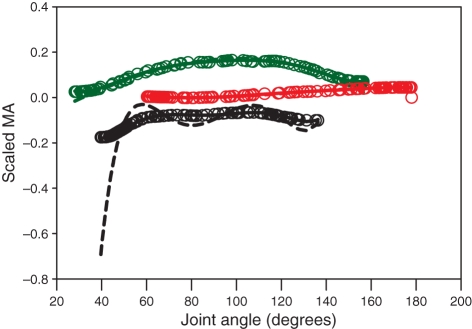
Muscles facilitate skeletal movement via the production of a torque or moment about a joint. The magnitude of the moment produced depends on both the force of muscular contraction and the size of the moment arm used to rotate the joint. Hence, larger muscle moment arms generate larger joint torques and forces at the point of application. The moment arms of a number of gibbon hind limb muscles were measured on four cadaveric specimens (one Hylobates lar, one H. moloch and two H. syndactylus). The tendon travel technique was used, utilizing an electro-goniometer and a linear voltage displacement transducer. The data were analysed using a technique based on a differentiated cubic spline and normalized to remove the effect of body size. The data demonstrated a functional differentiation between voluminous muscles with short fascicles having small muscle moment arms and muscles with longer fascicles and comparatively smaller physiological cross-sectional area having longer muscle moment arms. The functional implications of these particular configurations were simulated using a simple geometric fascicle strain model that predicts that the rectus femoris and gastrocnemius muscles are more likely to act primarily at their distal joints (knee and ankle, respectively) because they have short fascicles. The data also show that the main hip and knee extensors maintain a very small moment arm throughout the range of joint angles seen in the locomotion of gibbons, which (coupled to voluminous, short-fascicled muscles) might help facilitate rapid joint rotation during powerful movements.
Figures
References
-
- Alexander RM. Allometry of the limbs of antelopes (Bovidae) J Zool. 1977;183:125–146.
-
- Alexander RM. Elastic energy storage in running vertebrates. Amer Zool. 1984;24:85–94.
-
- Alexander RM. Leg design and jumping technique for humans, other vertebrates and insects. Philos Trans R Soc Lond B Biol Sci. 1995;347:235–248. - PubMed
-
- Alexander RM. Principles of Animal Locomotion. Princeton: Princeton University Press; 1996.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Miscellaneous
