

Force measurement platform for training and assessment of laparoscopic skills
- PMID: 20464416
- PMCID: PMC2982957
- DOI: 10.1007/s00464-010-1096-9
Force measurement platform for training and assessment of laparoscopic skills
Abstract
Background: To improve endoscopic surgical skills, an increasing number of surgical residents practice on box or virtual-reality (VR) trainers. Current training is mainly focused on hand-eye coordination. Training methods that focus on applying the right amount of force are not yet available.
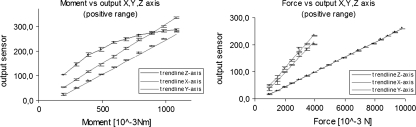
Methods: The aim of this project is to develop a system to measure forces and torques during laparoscopic training tasks as well as the development of force parameters that assess tissue manipulation tasks. The force and torque measurement range of the developed force platform are 0-4 N and 1 Nm (torque), respectively. To show the potential of the developed force platform, a pilot study was conducted in which five surgeons experienced in intracorporeal suturing and five novices performed a suture task in a box trainer.
Results: During the pilot study, the maximum and mean absolute nonzero force that the novice used were 4.7 N (SD 1.3 N) and 2.1 N (SD 0.6 N), respectively. With a maximum force of 2.6 N (SD 0.4 N) and mean nonzero force of 0.9 N (SD 0.3 N), the force exerted by the experts was significantly lower.
Conclusions: The designed platform is easy to build, affordable, and accurate and sensitive enough to reflect the most important differences in, e.g., maximal force, mean force, and standard deviation. Furthermore, the compact design makes it possible to use the force platform in most box trainers.
Figures











References
-
- Chmarra MK, Bakker NH, Grimbergen CA, Dankelman J. TrEndo, a device for tracking minimally invasive surgical instruments in training setups. Sens Actuators. 2005;126(2):328–334. doi: 10.1016/j.sna.2005.10.040. - DOI
-
- Middlebrook A, Chater P, Wilson M, Stone R, Sutton C, McCloy R. MIST VR. A laparoscopic surgery procedures trainer and evaluator. Stud Health Technol Inform. 1997;39(6):598–607. - PubMed
-
- Oshima N, Aizudding M, Midorikawa R, Solis J, Ogura Y, Takanishi A (2007) Development of a suture/ligature training system designed to provide quantitative information of the learning progress of trainees. In: IEEE international conference on robotics and automation, pp 2285–2291, 10–14 April 2007
MeSH terms
LinkOut - more resources
Full Text Sources
