

Uncertainty of feedback and state estimation determines the speed of motor adaptation
- PMID: 20485466
- PMCID: PMC2871692
- DOI: 10.3389/fncom.2010.00011
Uncertainty of feedback and state estimation determines the speed of motor adaptation
Abstract
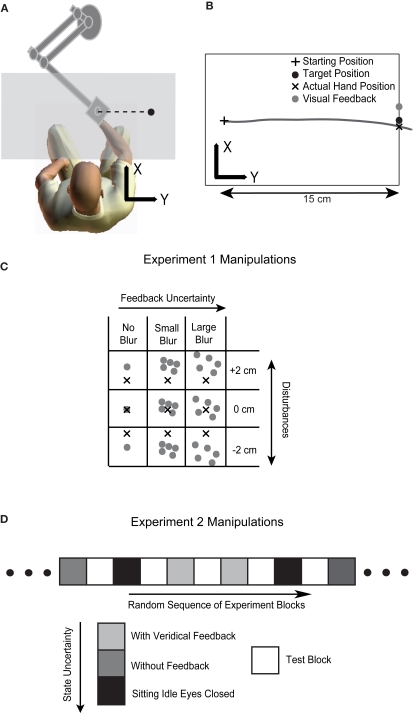
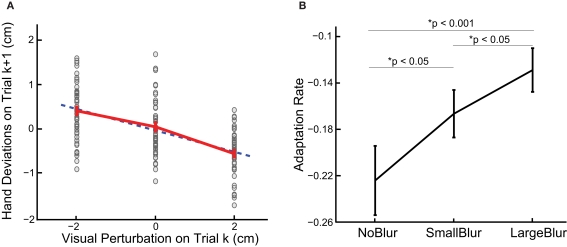
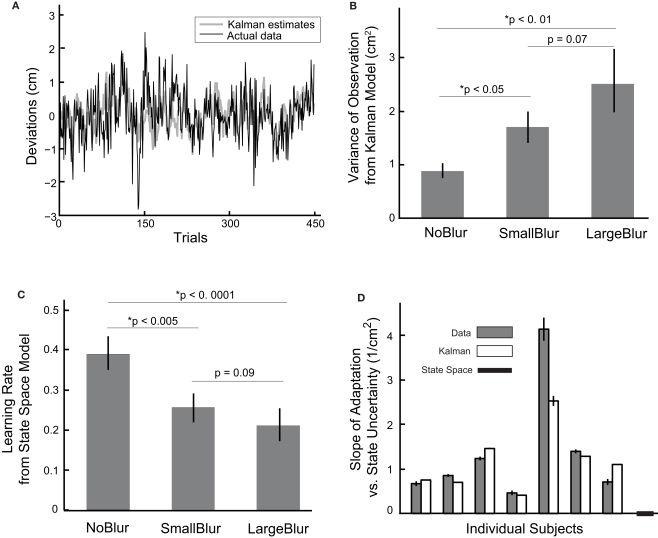
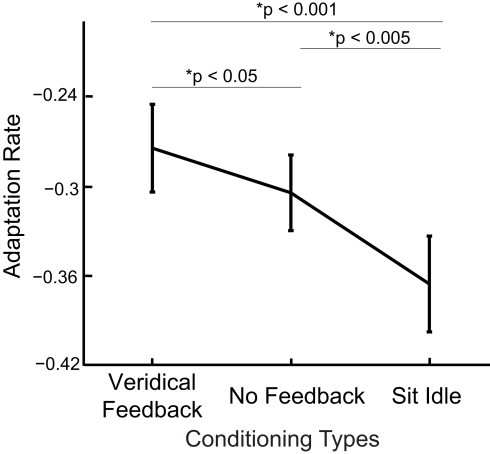
Humans can adapt their motor behaviors to deal with ongoing changes. To achieve this, the nervous system needs to estimate central variables for our movement based on past knowledge and new feedback, both of which are uncertain. In the Bayesian framework, rates of adaptation characterize how noisy feedback is in comparison to the uncertainty of the state estimate. The predictions of Bayesian models are intuitive: the nervous system should adapt slower when sensory feedback is more noisy and faster when its state estimate is more uncertain. Here we want to quantitatively understand how uncertainty in these two factors affects motor adaptation. In a hand reaching experiment we measured trial-by-trial adaptation to a randomly changing visual perturbation to characterize the way the nervous system handles uncertainty in state estimation and feedback. We found both qualitative predictions of Bayesian models confirmed. Our study provides evidence that the nervous system represents and uses uncertainty in state estimate and feedback during motor adaptation.
Keywords: Bayesian statistics; motor adaptation; motor learning; uncertainty.
Figures
References
-
- Alais D., Burr D. (2004). The ventriloquist effect results from near-optimal bimodal integration. Curr. Biol. 14, 257–262 - PubMed
-
- Burgar C., Lum P., Shor P., Van der Loos H. (2000). Development of robots for rehabilitation therapy: the Palo Alto VA/Stanford experience. J. Rehabil. Res. Dev. 376, 663–673 - PubMed
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous