

Electrocorticographic amplitude predicts finger positions during slow grasping motions of the hand
- PMID: 20489239
- PMCID: PMC4021582
- DOI: 10.1088/1741-2560/7/4/046002
Electrocorticographic amplitude predicts finger positions during slow grasping motions of the hand
Abstract
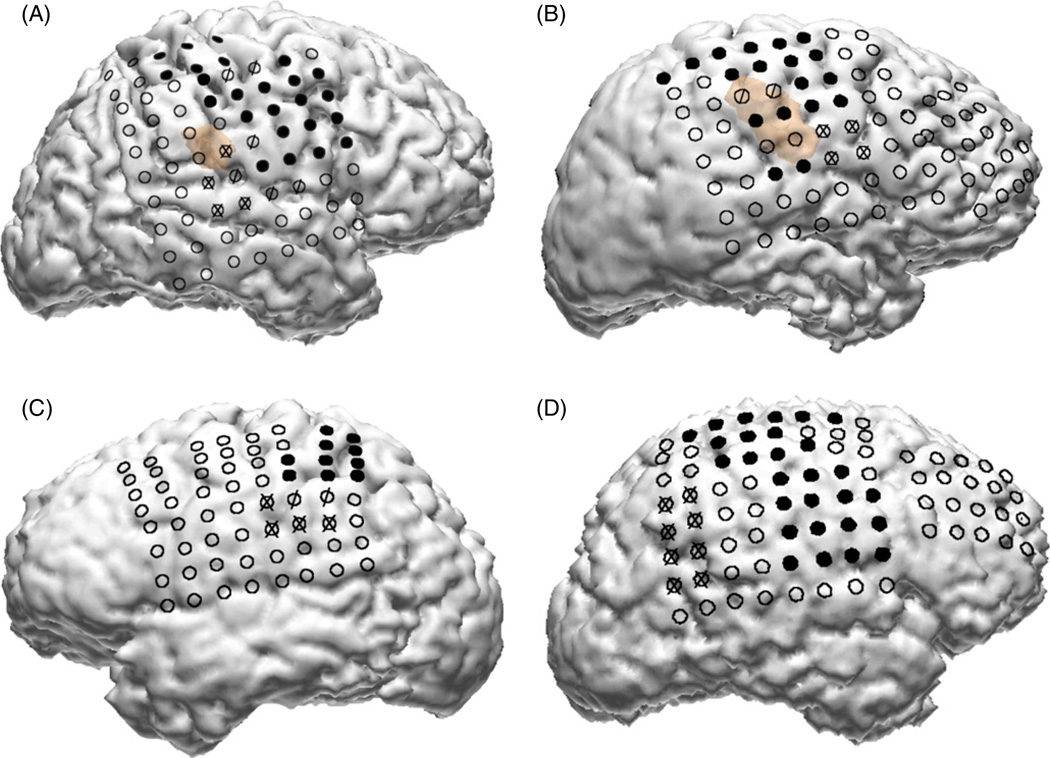
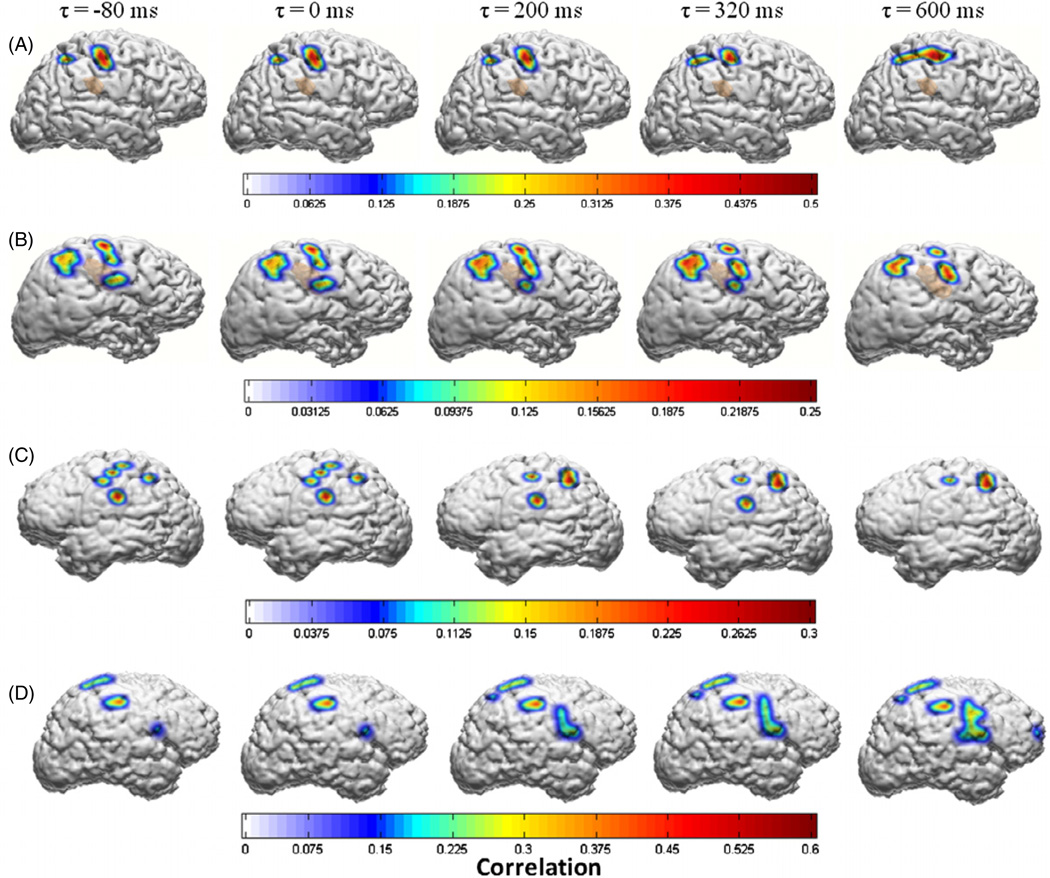
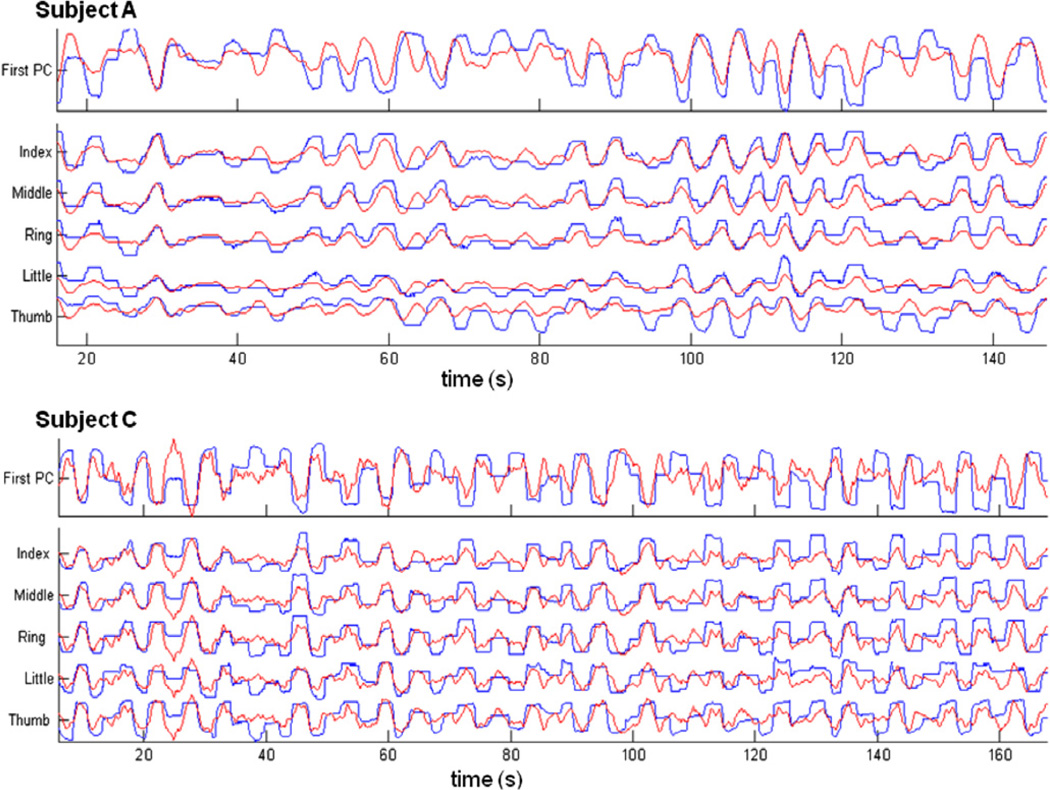
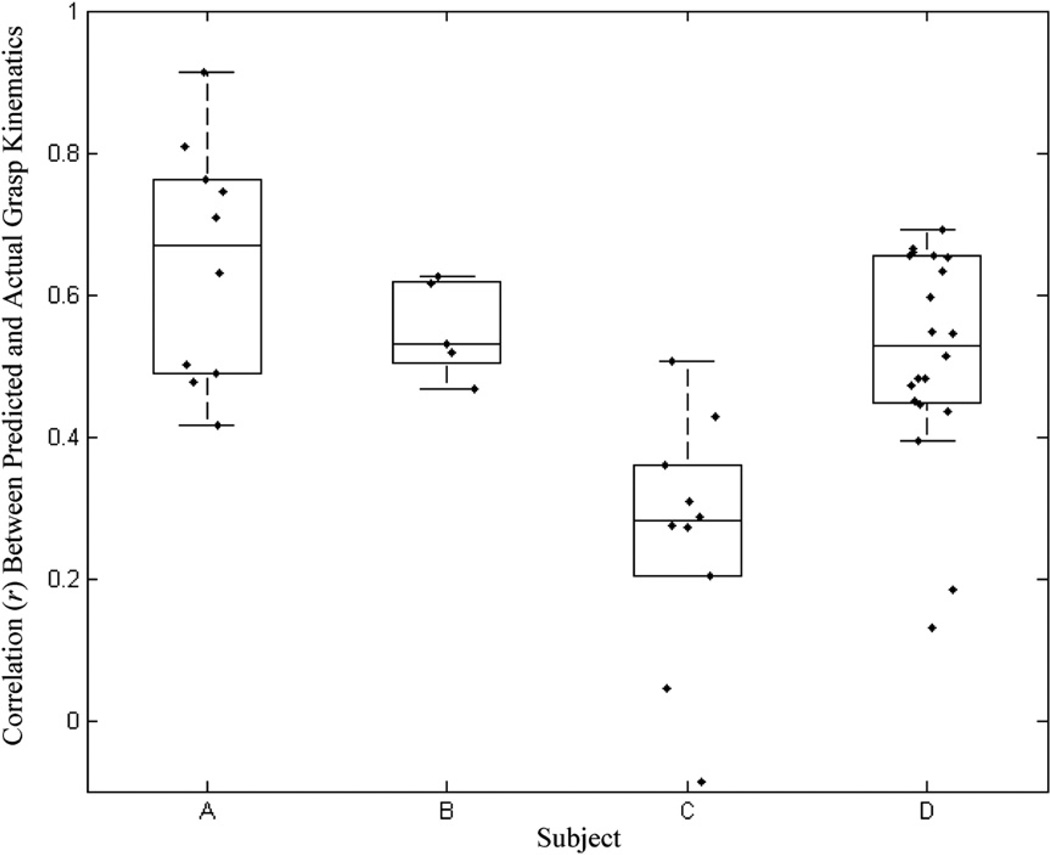
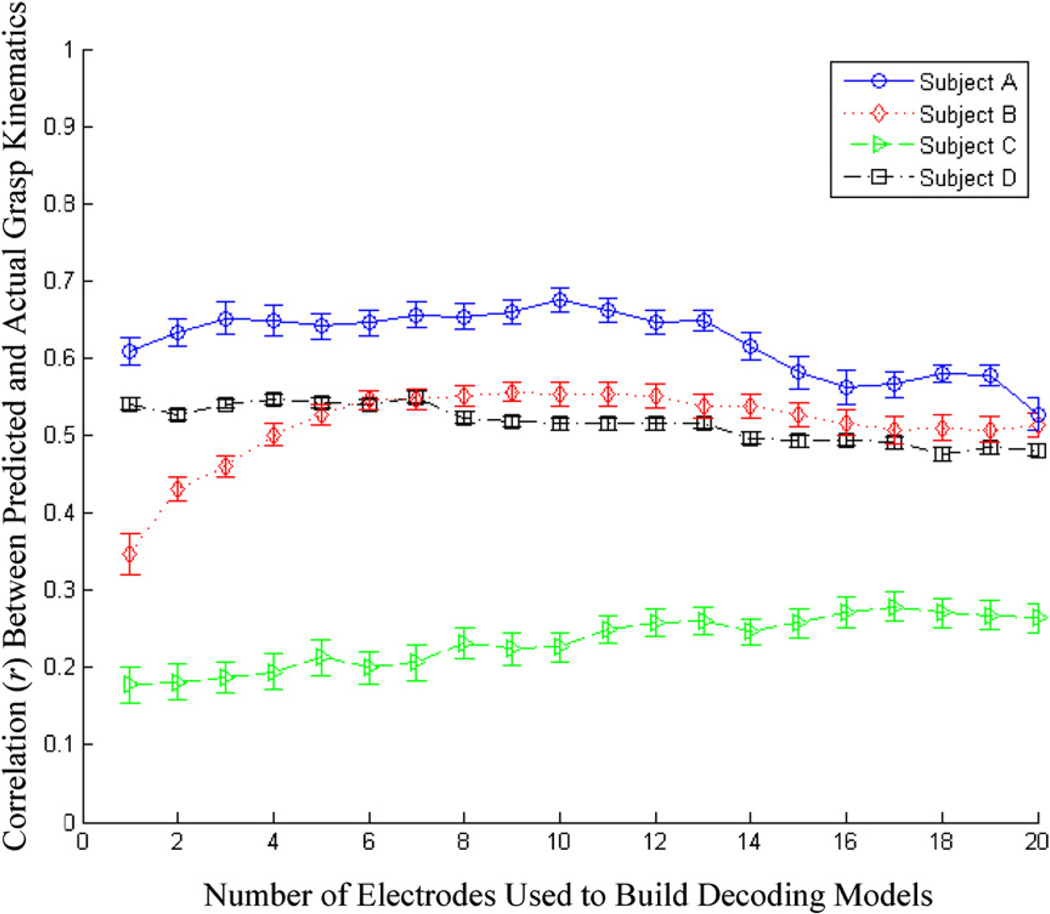
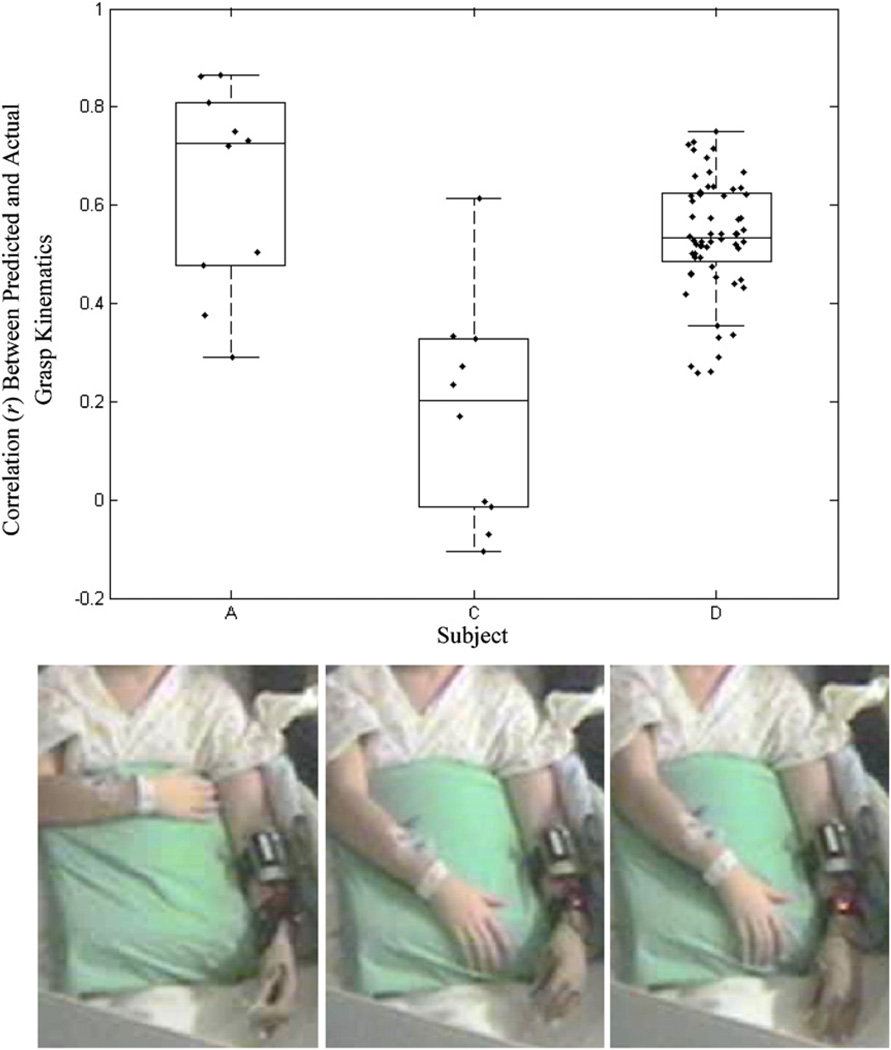
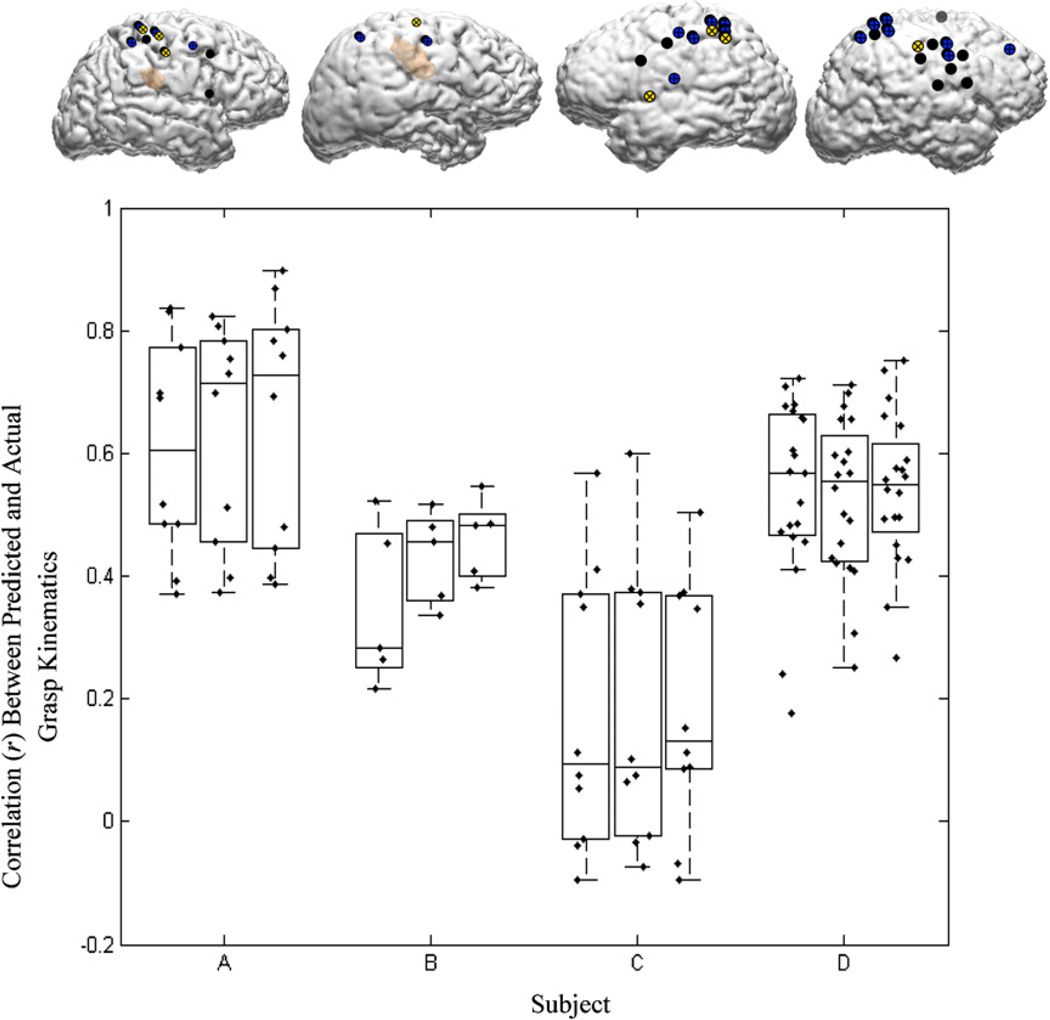
Four human subjects undergoing subdural electrocorticography for epilepsy surgery engaged in a range of finger and hand movements. We observed that the amplitudes of the low-pass filtered electrocorticogram (ECoG), also known as the local motor potential (LMP), over specific peri-Rolandic electrodes were correlated (p < 0.001) with the position of individual fingers as the subjects engaged in slow and deliberate grasping motions. A generalized linear model (GLM) of the LMP amplitudes from those electrodes yielded predictions for positions of the fingers that had a strong congruence with the actual finger positions (correlation coefficient, r; median = 0.51, maximum = 0.91), during displacements of up to 10 cm at the fingertips. For all the subjects, decoding filters trained on data from any given session were remarkably robust in their prediction performance across multiple sessions and days, and were invariant with respect to changes in wrist angle, elbow flexion and hand placement across these sessions (median r = 0.52, maximum r = 0.86). Furthermore, a reasonable prediction accuracy for grasp aperture was achievable with as few as three electrodes in all subjects (median r = 0.49; maximum r = 0.90). These results provide further evidence for the feasibility of robust and practical ECoG-based control of finger movements in upper extremity prosthetics.
Figures

References
-
- Singhal G, Acharya S, Davidovics N, He J, Thakor N. Including planning activity in feature space distributes activation over a broader neuron population. Conf. Proc. IEEE Eng. Med. Biol. Soc. 2007;2007:5349–5352. - PubMed
-
- Hamed SB, Schieber MH, Pouget A. Decoding M1 neurons during multiple finger movements. J. Neurophysiol. 2007;98:327–333. - PubMed
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical