Validation of the cat as a model for the human lumbar spine during simulated high-velocity, low-amplitude spinal manipulation
- PMID: 20590286
- PMCID: PMC3537495
- DOI: 10.1115/1.4001030
Validation of the cat as a model for the human lumbar spine during simulated high-velocity, low-amplitude spinal manipulation
Abstract
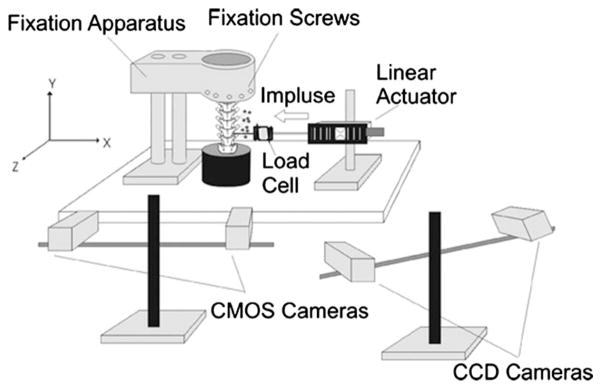
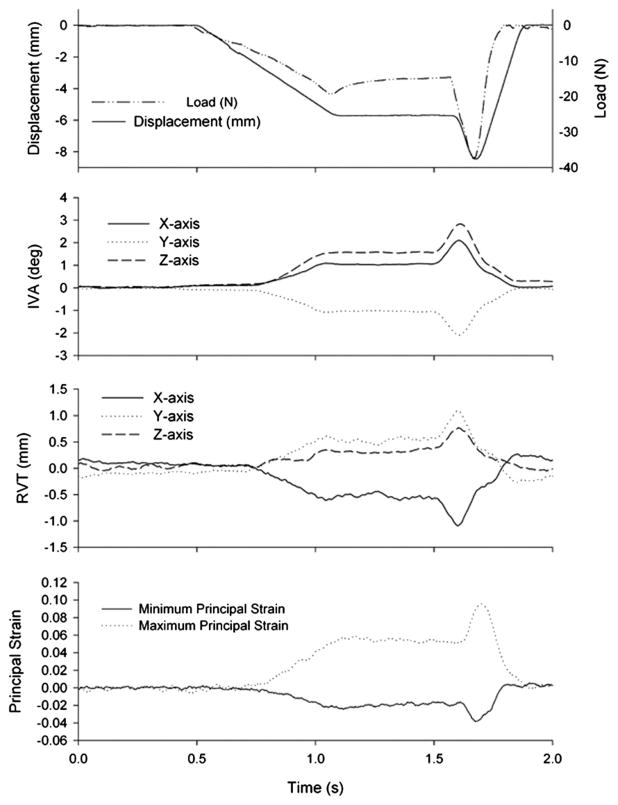
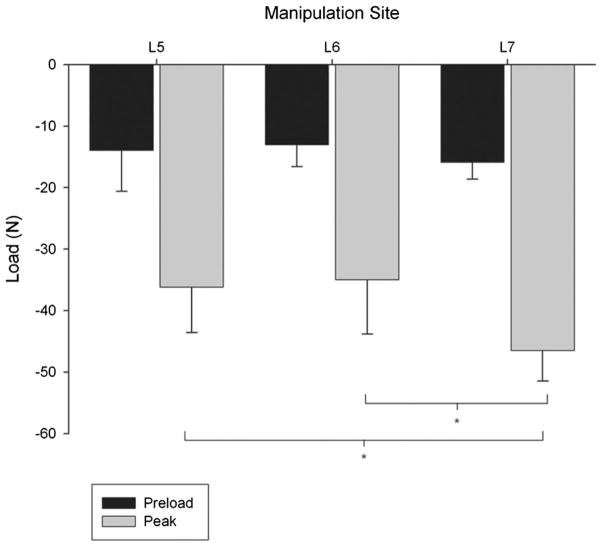
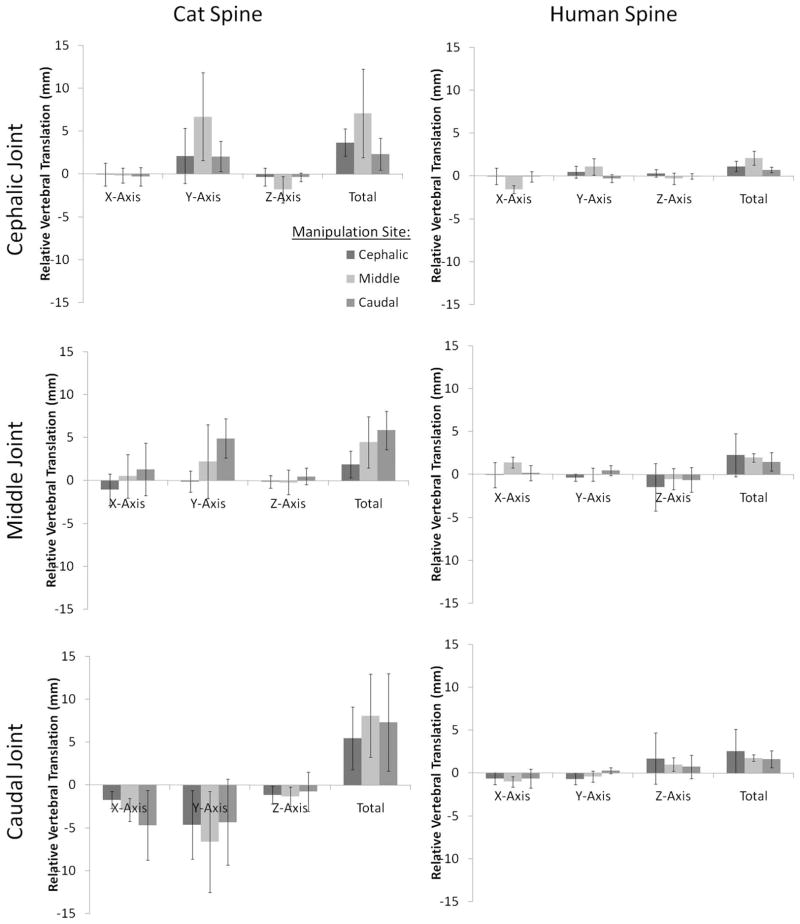
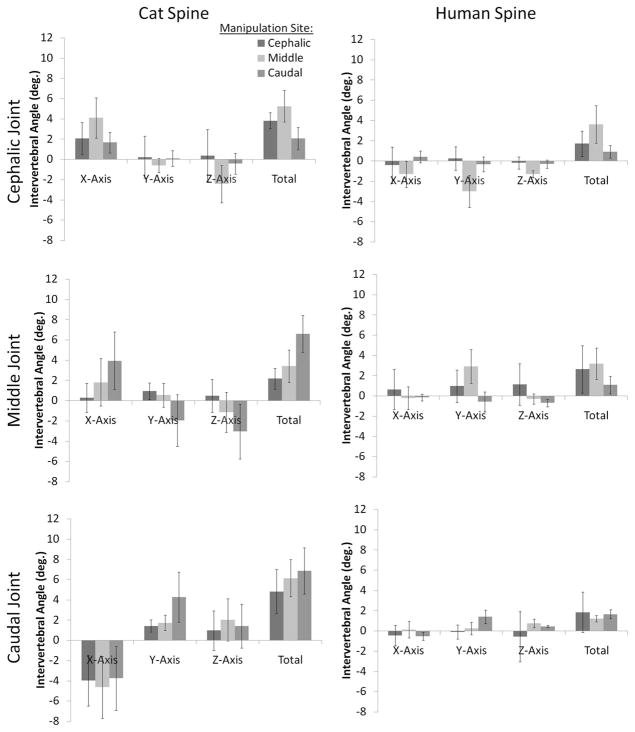
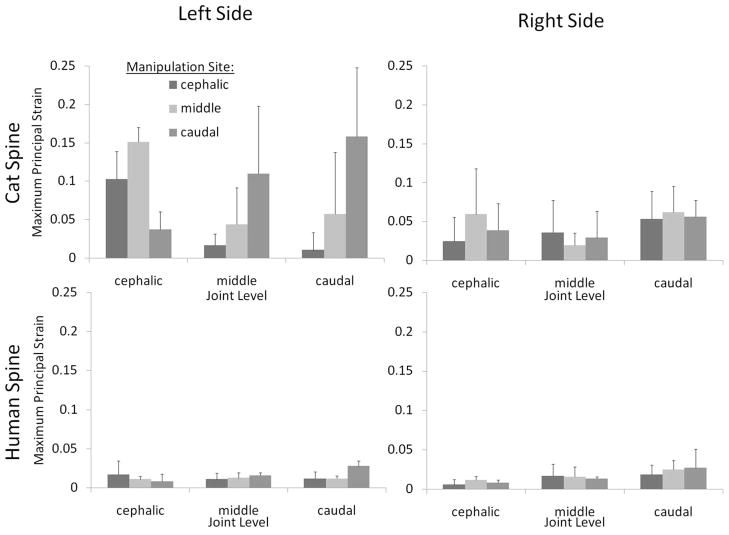
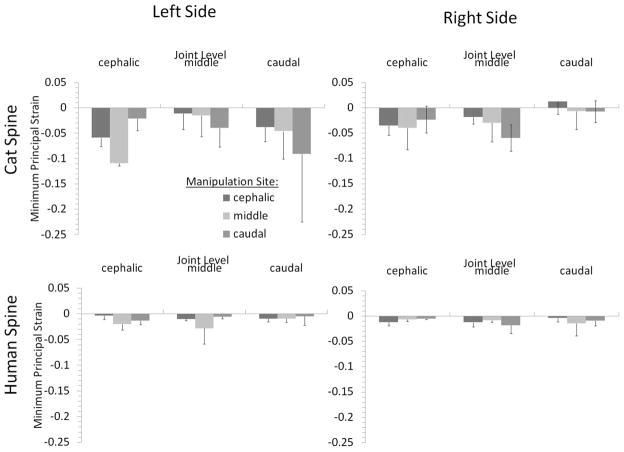
High-velocity, low-amplitude spinal manipulation (HVLA-SM) is an efficacious treatment for low back pain, although the physiological mechanisms underlying its effects remain elusive. The lumbar facet joint capsule (FJC) is innervated with mechanically sensitive neurons and it has been theorized that the neurophysiological benefits of HVLA-SM are partially induced by stimulation of FJC neurons. Biomechanical aspects of this theory have been investigated in humans while neurophysiological aspects have been investigated using cat models. The purpose of this study was to determine the relationship between human and cat lumbar spines during HVLA-SM. Cat lumbar spine specimens were mechanically tested, using a displacement-controlled apparatus, during simulated HVLA-SM applied at L5, L6, and L7 that produced preload forces of approximately 25% bodyweight for 0.5 s and peak forces that rose to 50-100% bodyweight within approximately 125 ms, similar to that delivered clinically. Joint kinematics and FJC strain were measured optically. Human FJC strain and kinematics data were taken from a prior study. Regression models were established for FJC strain magnitudes as functions of factors species, manipulation site, and interactions thereof. During simulated HVLA-SM, joint kinematics in cat spines were greater in magnitude compared with humans. Similar to human spines, site-specific HVLA-SM produced regional cat FJC strains at distant motion segments. Joint motions and FJC strain magnitudes for cat spines were larger than those for human spine specimens. Regression relationships demonstrated that species, HVLA-SM site, and interactions thereof were significantly and moderately well correlated for HVLA-SM that generated tensile strain in the FJC. The relationships established in the current study can be used in future neurophysiological studies conducted in cats to extrapolate how human FJC afferents might respond to HVLA-SM. The data from the current study warrant further investigation into the clinical relevance of site targeted HVLA-SM.
Figures
Similar articles
-
Relationships between joint motion and facet joint capsule strain during cat and human lumbar spinal motions.J Manipulative Physiol Ther. 2011 Sep;34(7):420-31. doi: 10.1016/j.jmpt.2011.05.005. Epub 2011 Jun 24. J Manipulative Physiol Ther. 2011. PMID: 21875516 Free PMC article.
-
Comparison of human lumbar facet joint capsule strains during simulated high-velocity, low-amplitude spinal manipulation versus physiological motions.Spine J. 2005 May-Jun;5(3):277-90. doi: 10.1016/j.spinee.2004.11.006. Spine J. 2005. PMID: 15863084 Free PMC article.
-
Paraspinal Muscle Spindle Response to Intervertebral Fixation and Segmental Thrust Level During Spinal Manipulation in an Animal Model.Spine (Phila Pa 1976). 2015 Jul 1;40(13):E752-9. doi: 10.1097/BRS.0000000000000915. Spine (Phila Pa 1976). 2015. PMID: 25856263 Free PMC article.
-
Neuromuscular Response to High-Velocity, Low-Amplitude Spinal Manipulation-An Overview.Medicina (Kaunas). 2025 Jan 22;61(2):187. doi: 10.3390/medicina61020187. Medicina (Kaunas). 2025. PMID: 40005304 Free PMC article. Review.
-
Patient positioning and spinal locking for lumbar spine rotation manipulation.Man Ther. 2001 Aug;6(3):130-8. doi: 10.1054/math.2001.0404. Man Ther. 2001. PMID: 11527452 Review.
Cited by
-
Effects of unilateral facet fixation and facetectomy on muscle spindle responsiveness during simulated spinal manipulation in an animal model.J Manipulative Physiol Ther. 2013 Nov-Dec;36(9):585-94. doi: 10.1016/j.jmpt.2013.08.007. Epub 2013 Oct 23. J Manipulative Physiol Ther. 2013. PMID: 24161386 Free PMC article.
-
Low-frequency high-magnitude mechanical strain of articular chondrocytes activates p38 MAPK and induces phenotypic changes associated with osteoarthritis and pain.Int J Mol Sci. 2014 Aug 19;15(8):14427-41. doi: 10.3390/ijms150814427. Int J Mol Sci. 2014. PMID: 25196344 Free PMC article.
-
Relationships between joint motion and facet joint capsule strain during cat and human lumbar spinal motions.J Manipulative Physiol Ther. 2011 Sep;34(7):420-31. doi: 10.1016/j.jmpt.2011.05.005. Epub 2011 Jun 24. J Manipulative Physiol Ther. 2011. PMID: 21875516 Free PMC article.
-
Effects of Thrust Magnitude and Duration on Immediate Postspinal Manipulation Trunk Muscle Spindle Responses.J Manipulative Physiol Ther. 2021 Jun;44(5):363-371. doi: 10.1016/j.jmpt.2021.03.004. Epub 2021 Jun 5. J Manipulative Physiol Ther. 2021. PMID: 34103172 Free PMC article.
-
High mechanical strain of primary intervertebral disc cells promotes secretion of inflammatory factors associated with disc degeneration and pain.Arthritis Res Ther. 2014 Jan 23;16(1):R21. doi: 10.1186/ar4449. Arthritis Res Ther. 2014. PMID: 24457003 Free PMC article.
References
-
- Wolsko PM, Eisenberg DM, Davis RB, Kessler R, Phillips RS. Patterns and Perceptions of Care for Treatment of Back and Neck Pain: Results of a National Survey. Spine. 2003;28(3):292–297. - PubMed
-
- Bronfort G. Spinal Manipulation: Current State of Research and Its Indications. Neurol Clin. 1999;17(1):91–111. - PubMed
-
- Bronfort G, Haas M, Evans RL, Bouter LM. Efficacy of Spinal Manipulation and Mobilization for Low Back Pain and Neck Pain: A Systematic Review and Best Evidence Synthesis. Eur Spine J. 2004;4(3):335–356. - PubMed
-
- Triano J, Herzog W. Clinical Biomechanics of Spinal Manipulation. Churchill Livingstone; New York: 2000. The Mechanics of Spinal Manipulation; pp. 92–190.
-
- Shekelle PG, Markovich M, Louie R. Factors Associated With Choosing a Chiropractor for Episodes of Back Pain Care. Med Care. 1995;33(8):842–850. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous