

Robust Motion Estimation and Structure Recovery from Endoscopic Image Sequences With an Adaptive Scale Kernel Consensus Estimator
- PMID: 20607128
- PMCID: PMC2895276
- DOI: 10.1109/CVPR.2008.4587687
Robust Motion Estimation and Structure Recovery from Endoscopic Image Sequences With an Adaptive Scale Kernel Consensus Estimator
Abstract
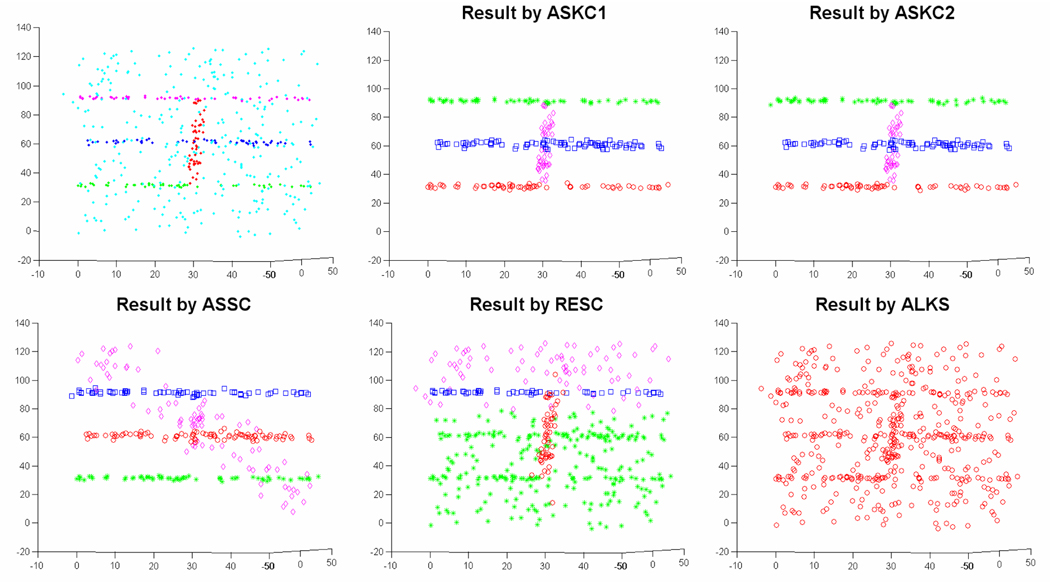
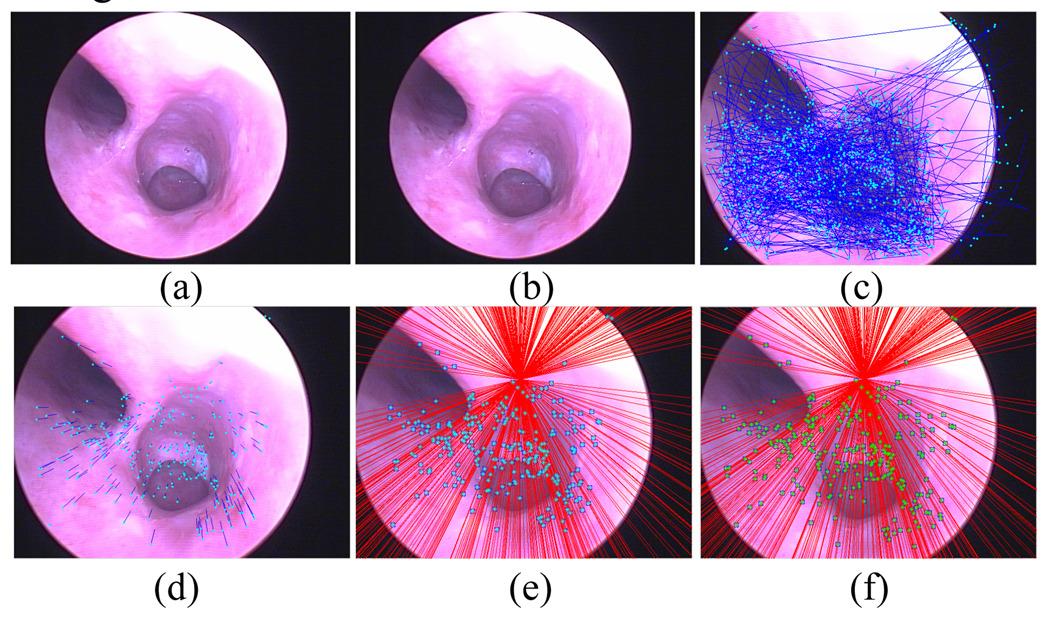
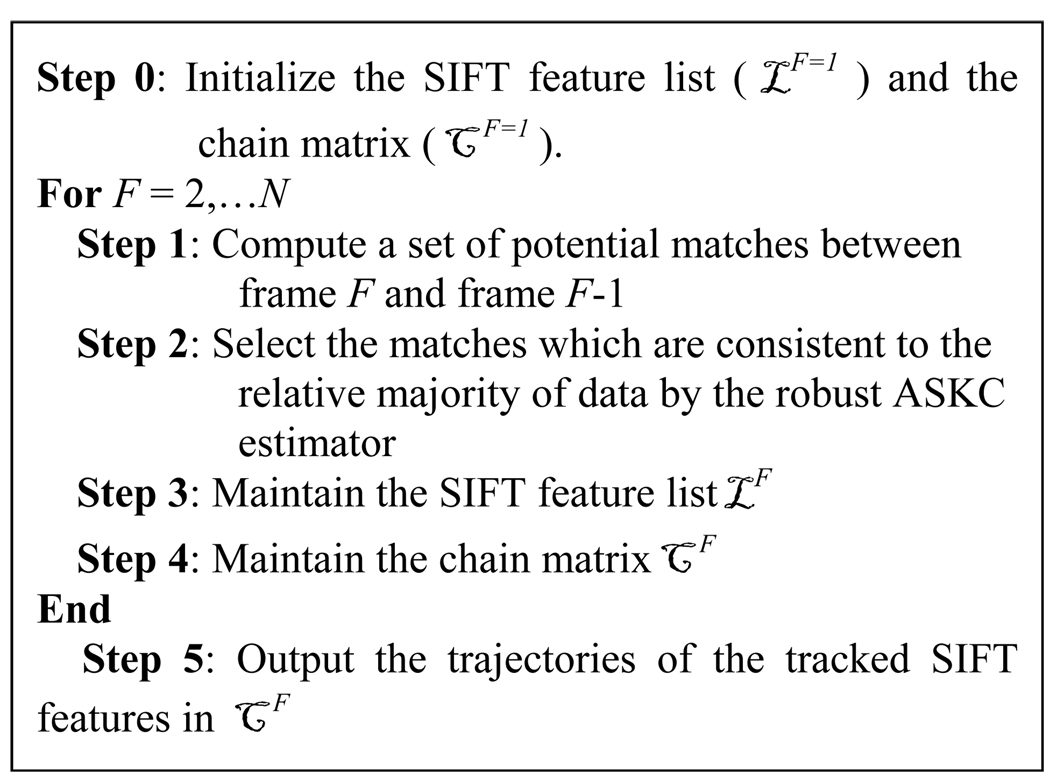
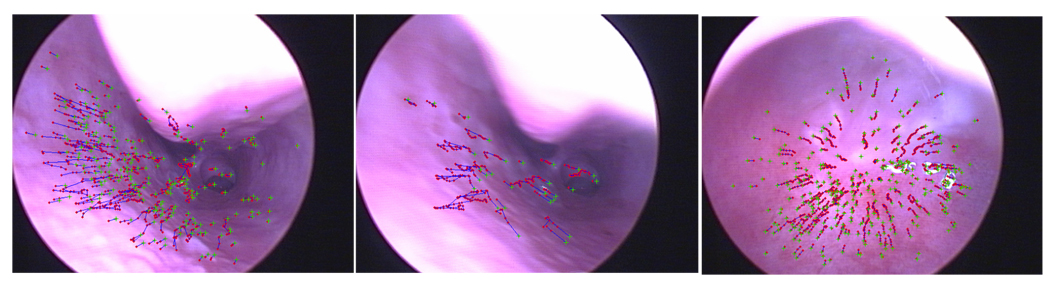
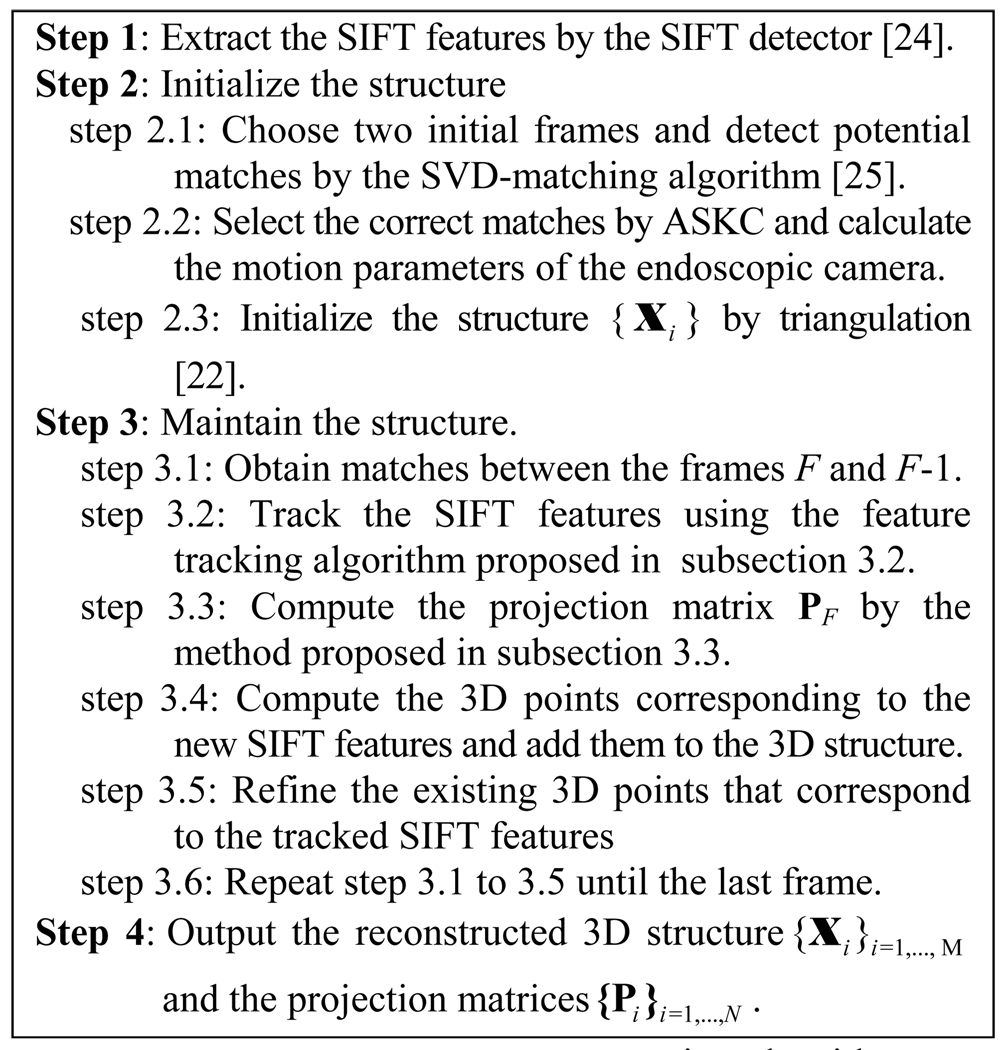
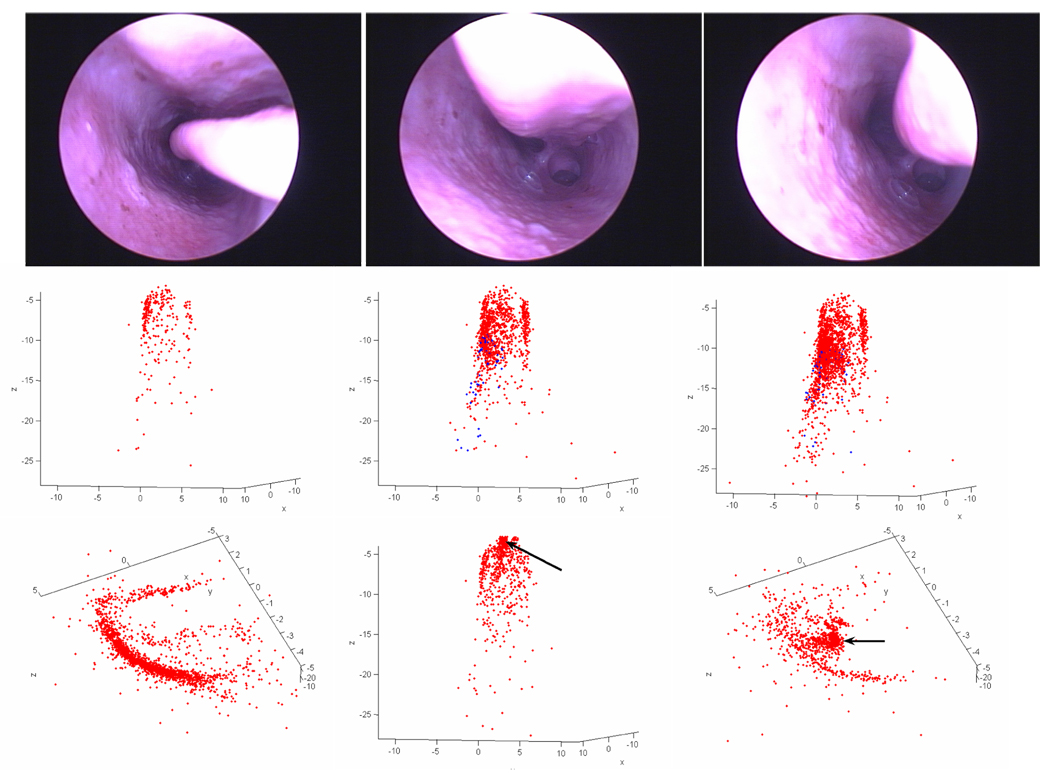
To correctly estimate the camera motion parameters and reconstruct the structure of the surrounding tissues from endoscopic image sequences, we need not only to deal with outliers (e.g., mismatches), which may involve more than 50% of the data, but also to accurately distinguish inliers (correct matches) from outliers. In this paper, we propose a new robust estimator, Adaptive Scale Kernel Consensus (ASKC), which can tolerate more than 50 percent outliers while automatically estimating the scale of inliers. With ASKC, we develop a reliable feature tracking algorithm. This, in turn, allows us to develop a complete system for estimating endoscopic camera motion and reconstructing anatomical structures from endoscopic image sequences. Preliminary experiments on endoscopic sinus imagery have achieved promising results.
Figures
References
-
- Kosugi Y, et al. An Articulated Neurosurgical Navigation System Using MRI and CT Images. T-BME. 1988:147–152. - PubMed
-
- Scholtz M, et al. Development of an Endoscopic Navigating System Based on Digital Image Processing. Journal of Computer Aided Surgery. 1998;3(3):134–143. - PubMed
-
- Burschka D, et al. Scale-Invariant Registration of Monocular Endoscopic Images to CT-Scans for Sinus Surgery Medical Image Analysis. 2005;9(5):413–439. - PubMed
-
- Helferty JP, Higgins WE. Technique for Registering 3D Virtual CT Images to Endoscopic Video. ICIP. 2001:893–896.
-
- Mori K, et al. A Method for Tracking the Camera Motion of Real Endoscope by Epipolar Geometry Analysis and Virtual Endoscopy System. MICCAI. 2001:1–8.
Grants and funding
LinkOut - more resources
Full Text Sources
Other Literature Sources