

Autonomous head-mounted electrophysiology systems for freely behaving primates
- PMID: 20655733
- PMCID: PMC3401169
- DOI: 10.1016/j.conb.2010.06.007
Autonomous head-mounted electrophysiology systems for freely behaving primates
Abstract
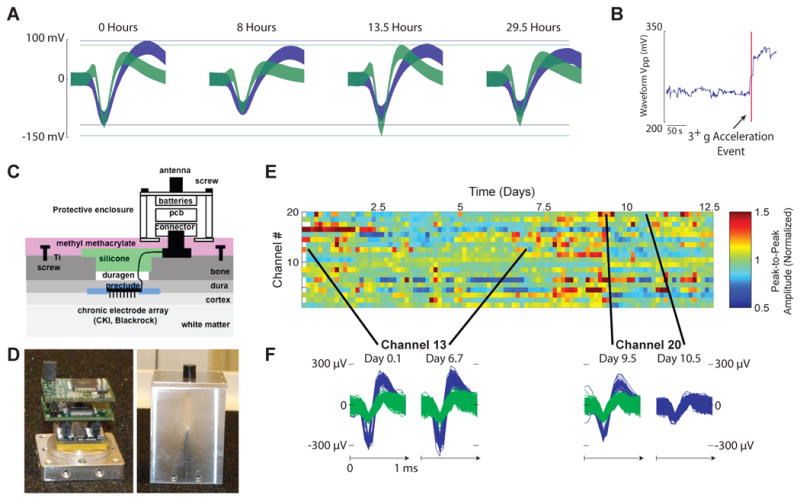
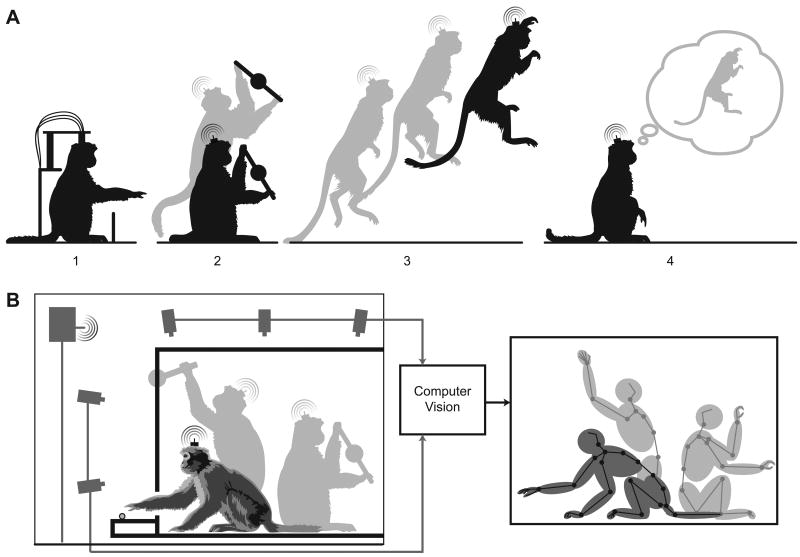
Recent technological advances have led to new light-weight battery-operated systems for electrophysiology. Such systems are head mounted, run for days without experimenter intervention, and can record and stimulate from single or multiple electrodes implanted in a freely behaving primate. Here we discuss existing systems, studies that use them, and how they can augment traditional, physically restrained, 'in-rig' electrophysiology. With existing technical capabilities, these systems can acquire multiple signal classes, such as spikes, local field potential, and electromyography signals, and can stimulate based on real-time processing of recorded signals. Moving forward, this class of technologies, along with advances in neural signal processing and behavioral monitoring, have the potential to dramatically expand the scope and scale of electrophysiological studies.
Copyright © 2010 Elsevier Ltd. All rights reserved.
Figures



Similar articles
-
Wireless multi-channel single unit recording in freely moving and vocalizing primates.J Neurosci Methods. 2012 Jan 15;203(1):28-40. doi: 10.1016/j.jneumeth.2011.09.004. Epub 2011 Sep 12. J Neurosci Methods. 2012. PMID: 21933683 Free PMC article.
-
Design of a twin tetrode microdrive and headstage for hippocampal single unit recordings in behaving mice.J Neurosci Methods. 2003 Oct 30;129(2):129-34. doi: 10.1016/s0165-0270(03)00172-9. J Neurosci Methods. 2003. PMID: 14511816
-
Miniature motorized microdrive and commutator system for chronic neural recording in small animals.J Neurosci Methods. 2001 Dec 15;112(2):83-94. doi: 10.1016/s0165-0270(01)00426-5. J Neurosci Methods. 2001. PMID: 11716944
-
Intracellular recording in behaving animals.Curr Opin Neurobiol. 2012 Feb;22(1):34-44. doi: 10.1016/j.conb.2011.10.013. Epub 2011 Nov 3. Curr Opin Neurobiol. 2012. PMID: 22054814 Free PMC article. Review.
-
New approaches for CMOS-based devices for large-scale neural recording.Curr Opin Neurobiol. 2015 Jun;32:31-7. doi: 10.1016/j.conb.2014.10.007. Epub 2014 Oct 30. Curr Opin Neurobiol. 2015. PMID: 25463562 Review.
Cited by
-
Head-mounted optical imaging and optogenetic stimulation system for use in behaving primates.Cell Rep Methods. 2022 Nov 22;2(12):100351. doi: 10.1016/j.crmeth.2022.100351. eCollection 2022 Dec 19. Cell Rep Methods. 2022. PMID: 36590689 Free PMC article.
-
Combining Wireless Neural Recording and Video Capture for the Analysis of Natural Gait.Int IEEE EMBS Conf Neural Eng. 2011 Apr-May;2011:613-616. doi: 10.1109/NER.2011.5910623. Int IEEE EMBS Conf Neural Eng. 2011. PMID: 26019730 Free PMC article.
-
Intention estimation in brain-machine interfaces.J Neural Eng. 2014 Feb;11(1):016004. doi: 10.1088/1741-2560/11/1/016004. J Neural Eng. 2014. PMID: 24654266 Free PMC article.
-
A Markerless 3D Computerized Motion Capture System Incorporating a Skeleton Model for Monkeys.PLoS One. 2016 Nov 3;11(11):e0166154. doi: 10.1371/journal.pone.0166154. eCollection 2016. PLoS One. 2016. PMID: 27812205 Free PMC article.
-
Simbios: an NIH national center for physics-based simulation of biological structures.J Am Med Inform Assoc. 2012 Mar-Apr;19(2):186-9. doi: 10.1136/amiajnl-2011-000488. Epub 2011 Nov 10. J Am Med Inform Assoc. 2012. PMID: 22081222 Free PMC article.
References
-
- Evarts EV. Relation of pyramidal tract activity to force exerted during voluntary movement. J Neurophysiol. 1968;32 - PubMed
-
- Mountcastle VB, Lynch JC, Georgopoulos A, Sakata H, Acuna C. Posterior parietal association cortex of the monkey: command functions for operations within extrapersonal space. J Neurophysiol. 1975;38:871–908. - PubMed
-
- Taylor D, Tillery SH, Schwartz A. Direct cortical control of 3D neuroprosthetic devices. Science. 2002;296:1829–1832. - PubMed
-
- Serruya M, Hatsopoulos N, Paninski L, Fellows M, Donoghue J. Instant neural control of a movement signal. Nature. 2002;416:141–142. - PubMed
-
- Musallam S, Corneil B, Greger B, Scherberger H, Andersen R. Cognitive control signals for neural prosthetics. Science. 2004;305:258–262. - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
