

Development and pilot testing of HEXORR: hand EXOskeleton rehabilitation robot
- PMID: 20667083
- PMCID: PMC2920290
- DOI: 10.1186/1743-0003-7-36
Development and pilot testing of HEXORR: hand EXOskeleton rehabilitation robot
Abstract
Background: Following acute therapeutic interventions, the majority of stroke survivors are left with a poorly functioning hemiparetic hand. Rehabilitation robotics has shown promise in providing patients with intensive therapy leading to functional gains. Because of the hand's crucial role in performing activities of daily living, attention to hand therapy has recently increased.
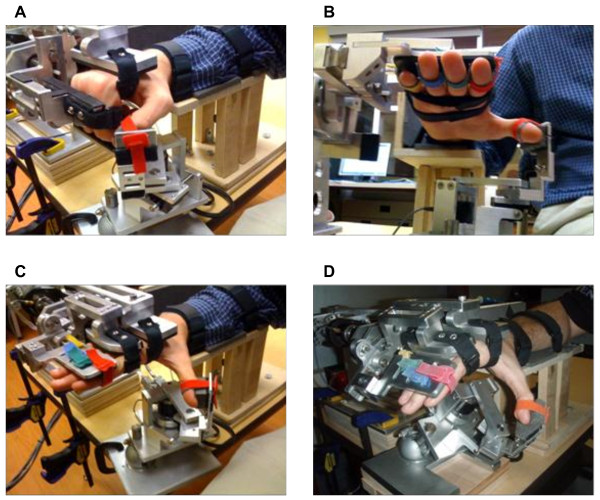
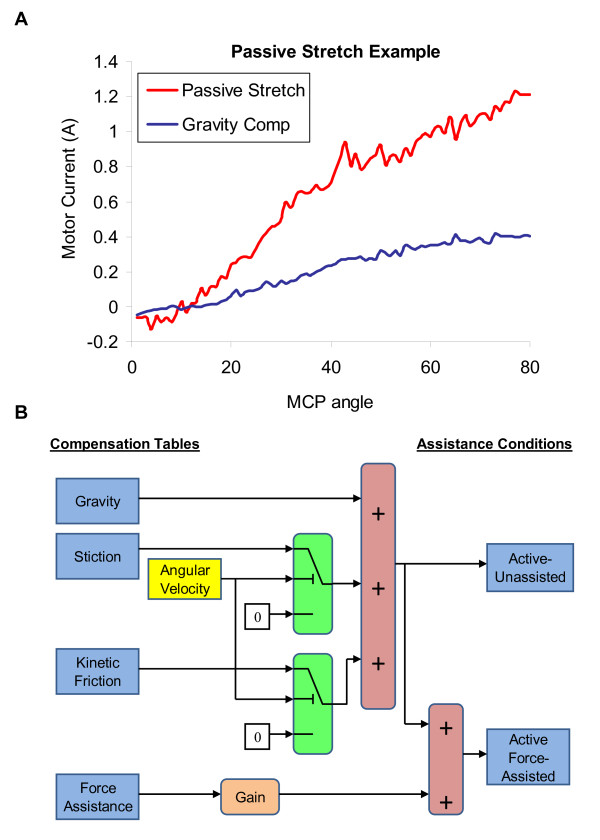
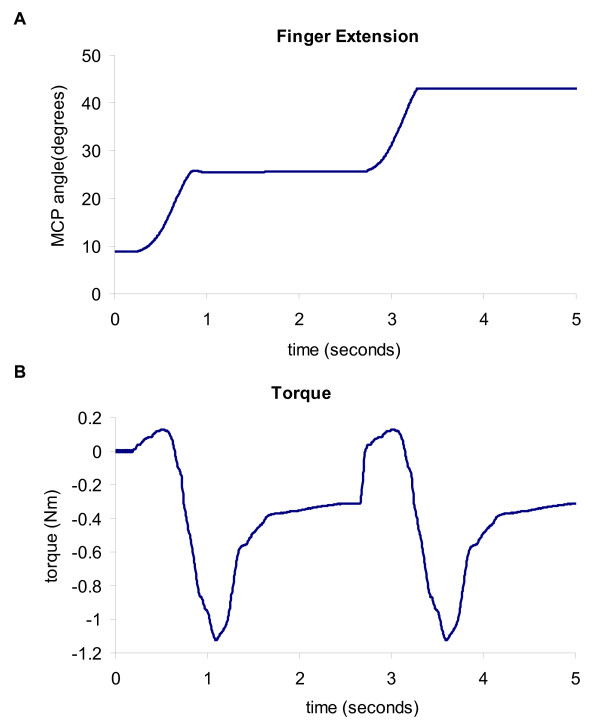
Methods: This paper introduces a newly developed Hand Exoskeleton Rehabilitation Robot (HEXORR). This device has been designed to provide full range of motion (ROM) for all of the hand's digits. The thumb actuator allows for variable thumb plane of motion to incorporate different degrees of extension/flexion and abduction/adduction. Compensation algorithms have been developed to improve the exoskeleton's backdrivability by counteracting gravity, stiction and kinetic friction. We have also designed a force assistance mode that provides extension assistance based on each individual's needs. A pilot study was conducted on 9 unimpaired and 5 chronic stroke subjects to investigate the device's ability to allow physiologically accurate hand movements throughout the full ROM. The study also tested the efficacy of the force assistance mode with the goal of increasing stroke subjects' active ROM while still requiring active extension torque on the part of the subject.
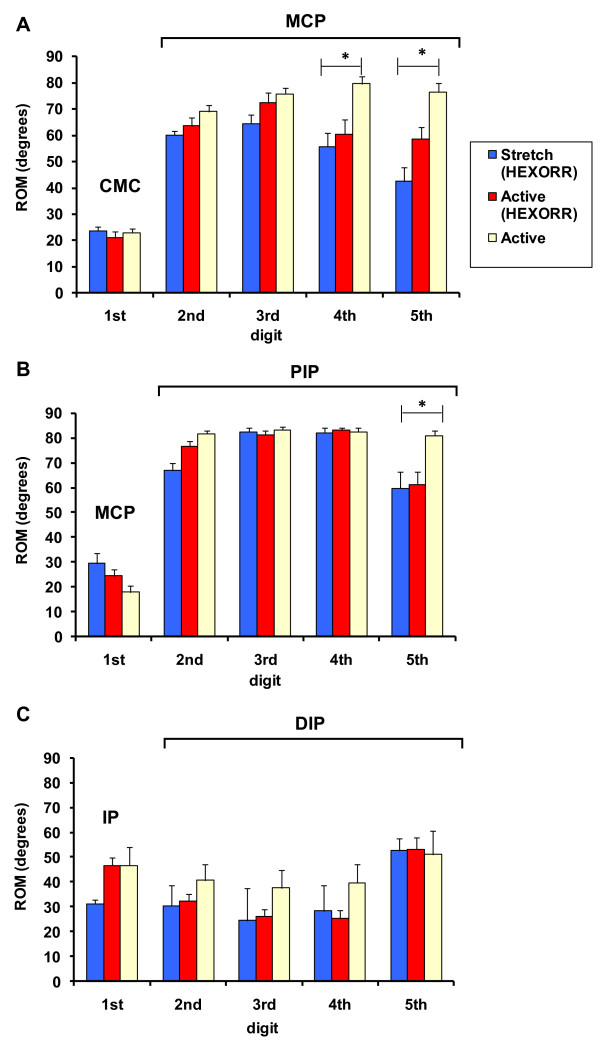
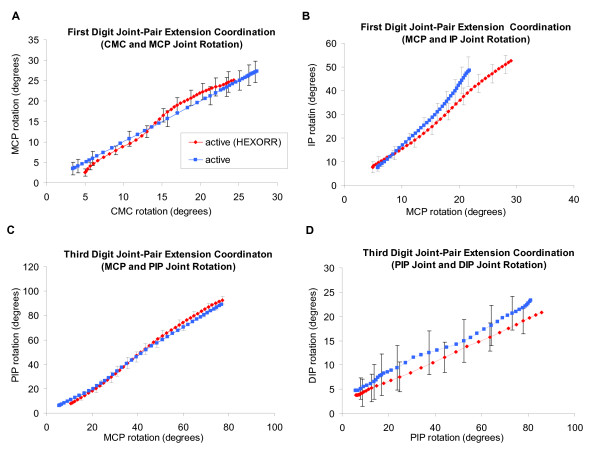
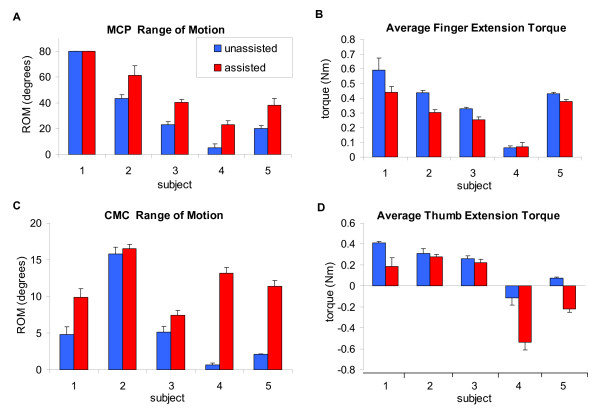
Results: For 12 of the hand digits'15 joints in neurologically normal subjects, there were no significant ROM differences (P > 0.05) between active movements performed inside and outside of HEXORR. Interjoint coordination was examined in the 1st and 3rd digits, and no differences were found between inside and outside of the device (P > 0.05). Stroke subjects were capable of performing free hand movements inside of the exoskeleton and the force assistance mode was successful in increasing active ROM by 43 +/- 5% (P < 0.001) and 24 +/- 6% (P = 0.041) for the fingers and thumb, respectively.
Conclusions: Our pilot study shows that this device is capable of moving the hand's digits through nearly the entire ROM with physiologically accurate trajectories. Stroke subjects received the device intervention well and device impedance was minimized so that subjects could freely extend and flex their digits inside of HEXORR. Our active force-assisted condition was successful in increasing the subjects' ROM while promoting active participation.
Figures
Similar articles
-
Hand function recovery in chronic stroke with HEXORR robotic training: A case series.Annu Int Conf IEEE Eng Med Biol Soc. 2010;2010:4485-8. doi: 10.1109/IEMBS.2010.5626037. Annu Int Conf IEEE Eng Med Biol Soc. 2010. PMID: 21095777
-
Performance adaptive training control strategy for recovering wrist movements in stroke patients: a preliminary, feasibility study.J Neuroeng Rehabil. 2009 Dec 7;6:44. doi: 10.1186/1743-0003-6-44. J Neuroeng Rehabil. 2009. PMID: 19968873 Free PMC article. Clinical Trial.
-
Effects of electromyography-driven robot-aided hand training with neuromuscular electrical stimulation on hand control performance after chronic stroke.Disabil Rehabil Assist Technol. 2015 Mar;10(2):149-59. doi: 10.3109/17483107.2013.873491. Epub 2013 Dec 31. Disabil Rehabil Assist Technol. 2015. PMID: 24377757
-
An overview of robotic/mechanical devices for post-stroke thumb rehabilitation.Disabil Rehabil Assist Technol. 2018 Oct;13(7):683-703. doi: 10.1080/17483107.2018.1425746. Epub 2018 Jan 15. Disabil Rehabil Assist Technol. 2018. PMID: 29334274 Review.
-
Robotic approaches for rehabilitation of hand function after stroke.Am J Phys Med Rehabil. 2012 Nov;91(11 Suppl 3):S242-54. doi: 10.1097/PHM.0b013e31826bcedb. Am J Phys Med Rehabil. 2012. PMID: 23080040 Review.
Cited by
-
A Novel Clinical-Driven Design for Robotic Hand Rehabilitation: Combining Sensory Training, Effortless Setup, and Large Range of Motion in a Palmar Device.Front Neurorobot. 2021 Dec 20;15:748196. doi: 10.3389/fnbot.2021.748196. eCollection 2021. Front Neurorobot. 2021. PMID: 34987371 Free PMC article.
-
Customizable Optical Force Sensor for Fast Prototyping and Cost-Effective Applications.Sensors (Basel). 2018 Feb 7;18(2):493. doi: 10.3390/s18020493. Sensors (Basel). 2018. PMID: 29414861 Free PMC article.
-
Advanced Myoelectric Control for Robotic Hand-Assisted Training: Outcome from a Stroke Patient.Front Neurol. 2017 Mar 20;8:107. doi: 10.3389/fneur.2017.00107. eCollection 2017. Front Neurol. 2017. PMID: 28373860 Free PMC article.
-
User-Centric Feedback for the Development and Review of a Unique Robotic Glove Prototype to Be Used in Therapy.J Healthc Eng. 2017;2017:3896089. doi: 10.1155/2017/3896089. Epub 2017 Jun 4. J Healthc Eng. 2017. PMID: 29065593 Free PMC article.
-
Development of a biomimetic hand exotendon device (BiomHED) for restoration of functional hand movement post-stroke.IEEE Trans Neural Syst Rehabil Eng. 2014 Jul;22(4):886-98. doi: 10.1109/TNSRE.2014.2298362. Epub 2014 Jan 13. IEEE Trans Neural Syst Rehabil Eng. 2014. PMID: 24760924 Free PMC article.
References
-
- Stroke Statistic: 2009 Update. Centennial, CO: National Stroke Association; 2009.
-
- Heart Disease and Stroke Statistics: 2005 Update. Dallas, Tex: American Heart Association; 2005.
-
- Kwakkel G, Kollen BJ, an der Grond J, Prevo AJ. Probability of regaining dexterity in the flaccid upper limb. The impact of severity of paresis and time since onset in acute stroke. Stroke. 2003;34:2181–2186. doi: 10.1161/01.STR.0000087172.16305.CD. - DOI - PubMed
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Other Literature Sources
Medical
