

Neuromechanical simulation
- PMID: 20700384
- PMCID: PMC2914529
- DOI: 10.3389/fnbeh.2010.00040
Neuromechanical simulation
Abstract
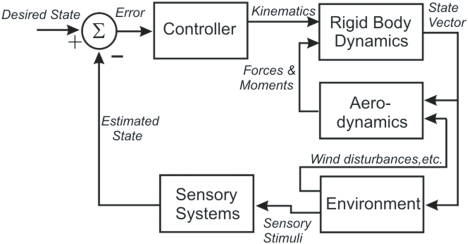
The importance of the interaction between the body and the brain for the control of behavior has been recognized in recent years with the advent of neuromechanics, a field in which the coupling between neural and biomechanical processes is an explicit focus. A major tool used in neuromechanics is simulation, which connects computational models of neural circuits to models of an animal's body situated in a virtual physical world. This connection closes the feedback loop that links the brain, the body, and the world through sensory stimuli, muscle contractions, and body movement. Neuromechanical simulations enable investigators to explore the dynamical relationships between the brain, the body, and the world in ways that are difficult or impossible through experiment alone. Studies in a variety of animals have permitted the analysis of extremely complex and dynamic neuromechanical systems, they have demonstrated that the nervous system functions synergistically with the mechanical properties of the body, they have examined hypotheses that are difficult to test experimentally, and they have explored the role of sensory feedback in controlling complex mechanical systems with many degrees of freedom. Each of these studies confronts a common set of questions: (i) how to abstract key features of the body, the world and the CNS in a useful model, (ii) how to ground model parameters in experimental reality, (iii) how to optimize the model and identify points of sensitivity and insensitivity, and (iv) how to share neuromechanical models for examination, testing, and extension by others.
Keywords: behavior; biomechanics; computational model; motor control; movement; sensorimotor integration; sensory feedback.
Figures
References
-
- Brown T. G. (1911). The intrinsic factors in the act of progression in the mammal. Proc. R. Soc. Lond. B Biol. Sci. 84, 308–31910.1098/rspb.1911.0077 - DOI
LinkOut - more resources
Full Text Sources