

Cognitive vision system for control of dexterous prosthetic hands: experimental evaluation
- PMID: 20731834
- PMCID: PMC2940869
- DOI: 10.1186/1743-0003-7-42
Cognitive vision system for control of dexterous prosthetic hands: experimental evaluation
Abstract
Background: Dexterous prosthetic hands that were developed recently, such as SmartHand and i-LIMB, are highly sophisticated; they have individually controllable fingers and the thumb that is able to abduct/adduct. This flexibility allows implementation of many different grasping strategies, but also requires new control algorithms that can exploit the many degrees of freedom available. The current study presents and tests the operation of a new control method for dexterous prosthetic hands.
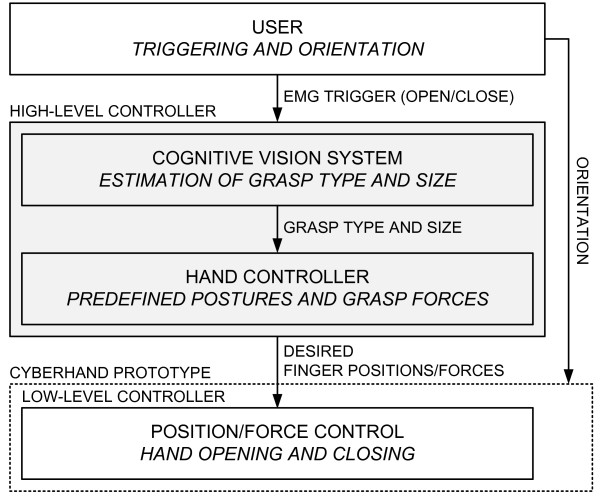
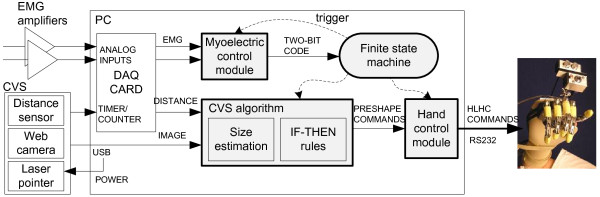
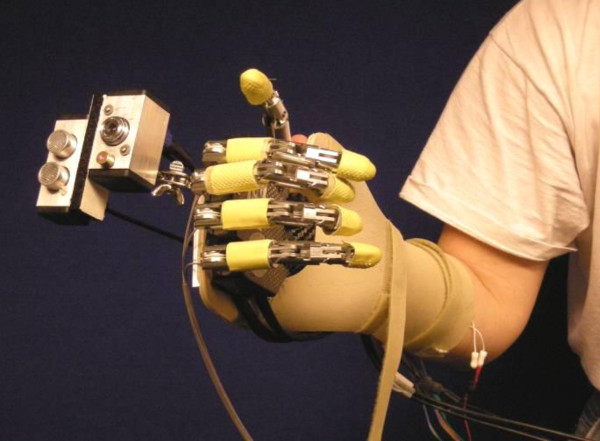
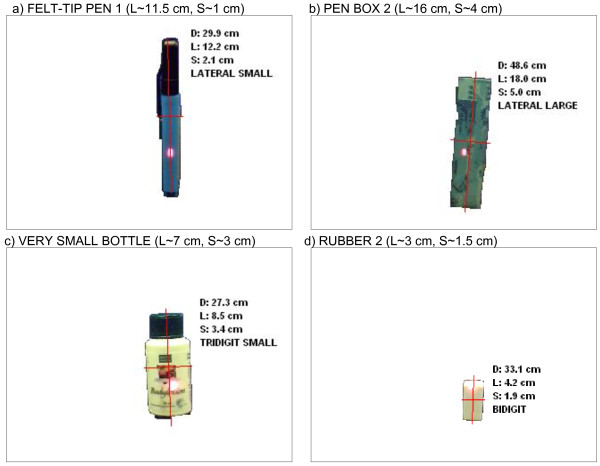
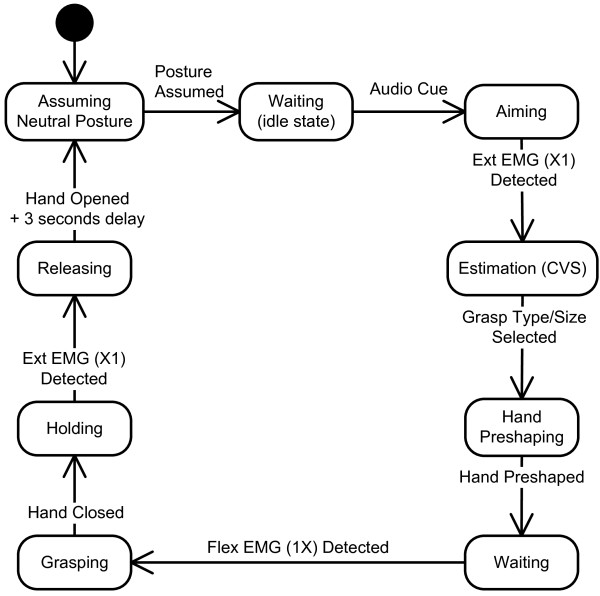
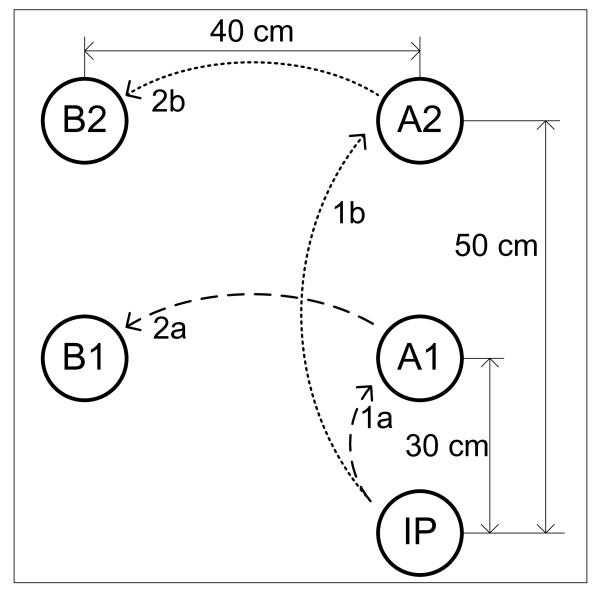
Methods: The central component of the proposed method is an autonomous controller comprising a vision system with rule-based reasoning mounted on a dexterous hand (CyberHand). The controller, termed cognitive vision system (CVS), mimics biological control and generates commands for prehension. The CVS was integrated into a hierarchical control structure: 1) the user triggers the system and controls the orientation of the hand; 2) a high-level controller automatically selects the grasp type and size; and 3) an embedded hand controller implements the selected grasp using closed-loop position/force control. The operation of the control system was tested in 13 healthy subjects who used Cyberhand, attached to the forearm, to grasp and transport 18 objects placed at two different distances.
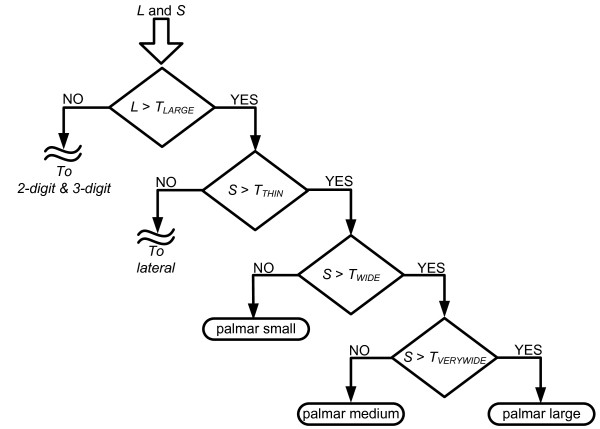
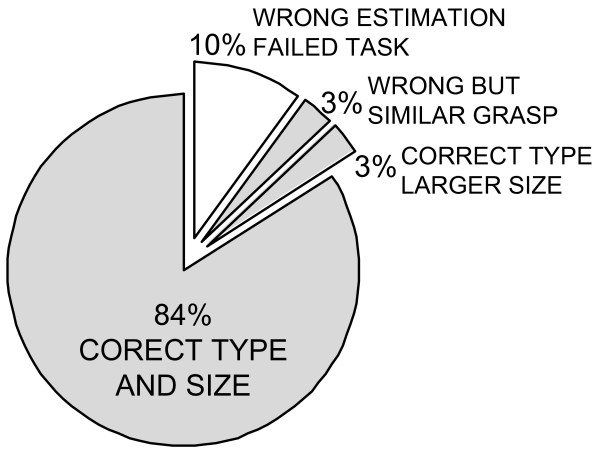
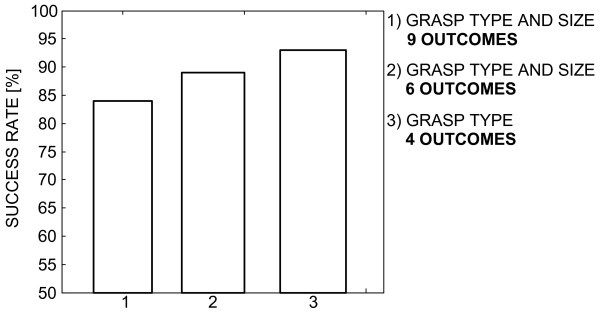
Results: The system correctly estimated grasp type and size (nine commands in total) in about 84% of the trials. In an additional 6% of the trials, the grasp type and/or size were different from the optimal ones, but they were still good enough for the grasp to be successful. If the control task was simplified by decreasing the number of possible commands, the classification accuracy increased (e.g., 93% for guessing the grasp type only).
Conclusions: The original outcome of this research is a novel controller empowered by vision and reasoning and capable of high-level analysis (i.e., determining object properties) and autonomous decision making (i.e., selecting the grasp type and size). The automatic control eases the burden from the user and, as a result, the user can concentrate on what he/she does, not on how he/she should do it. The tests showed that the performance of the controller was satisfactory and that the users were able to operate the system with minimal prior training.
Figures
Similar articles
-
Design and Functional Evaluation of a Dexterous Myoelectric Hand Prosthesis With Biomimetic Tactile Sensor.IEEE Trans Neural Syst Rehabil Eng. 2018 Jul;26(7):1391-1399. doi: 10.1109/TNSRE.2018.2844807. IEEE Trans Neural Syst Rehabil Eng. 2018. PMID: 29985148
-
Stereovision and augmented reality for closed-loop control of grasping in hand prostheses.J Neural Eng. 2014 Aug;11(4):046001. doi: 10.1088/1741-2560/11/4/046001. Epub 2014 Jun 3. J Neural Eng. 2014. PMID: 24891493
-
The SmartHand transradial prosthesis.J Neuroeng Rehabil. 2011 May 22;8:29. doi: 10.1186/1743-0003-8-29. J Neuroeng Rehabil. 2011. PMID: 21600048 Free PMC article.
-
Control of Multifunctional Prosthetic Hands by Processing the Electromyographic Signal.Crit Rev Biomed Eng. 2017;45(1-6):383-410. doi: 10.1615/CritRevBiomedEng.v45.i1-6.150. Crit Rev Biomed Eng. 2017. PMID: 29953384 Review.
-
Limb movement: getting a handle on grasp.Curr Biol. 2004 Sep 7;14(17):R714-5. doi: 10.1016/j.cub.2004.08.046. Curr Biol. 2004. PMID: 15341763 Review.
Cited by
-
Hand-Gesture Recognition Based on EMG and Event-Based Camera Sensor Fusion: A Benchmark in Neuromorphic Computing.Front Neurosci. 2020 Aug 5;14:637. doi: 10.3389/fnins.2020.00637. eCollection 2020. Front Neurosci. 2020. PMID: 32903824 Free PMC article.
-
Radio frequency identification--an innovative solution to guide dexterous prosthetic hands.Annu Int Conf IEEE Eng Med Biol Soc. 2011;2011:3511-4. doi: 10.1109/IEMBS.2011.6090948. Annu Int Conf IEEE Eng Med Biol Soc. 2011. PMID: 22255097 Free PMC article.
-
Improving Robotic Hand Prosthesis Control With Eye Tracking and Computer Vision: A Multimodal Approach Based on the Visuomotor Behavior of Grasping.Front Artif Intell. 2022 Jan 25;4:744476. doi: 10.3389/frai.2021.744476. eCollection 2021. Front Artif Intell. 2022. PMID: 35146422 Free PMC article.
-
Microsoft kinect-based artificial perception system for control of functional electrical stimulation assisted grasping.Biomed Res Int. 2014;2014:740469. doi: 10.1155/2014/740469. Epub 2014 Aug 19. Biomed Res Int. 2014. PMID: 25202707 Free PMC article.
-
Human Hand Anatomy-Based Prosthetic Hand.Sensors (Basel). 2020 Dec 28;21(1):137. doi: 10.3390/s21010137. Sensors (Basel). 2020. PMID: 33379252 Free PMC article.
References
-
- Motion control hand. http://www.utaharm.com/etd.php
-
- Upper extremity prosthetics. http://www.ottobockus.com/cps/rde/xchg/ob_us_en/hs.xsl/5057.html
-
- Cipriani C, Controzzi M, Carrozza MC. Progress towards the development of the SmartHand transradial prosthesis. Proc Int Conf Rehabil Robot, ICORR, Jun 23-26, 2009; Kyoto, Japan. 2009. pp. 682–687.
-
- Huang H, Jiang L, Liu Y, Hou L, Cai H, Liu H. The Mechanical Design and Experiments of HIT/DLR Prosthetic Hand. Proc IEEE Int Conf Robot Biomim, ROBIO. 2006. pp. 896–901.
Publication types
MeSH terms
LinkOut - more resources
Full Text Sources
Medical
Molecular Biology Databases
