

The nervous system uses nonspecific motor learning in response to random perturbations of varying nature
- PMID: 20861427
- PMCID: PMC3007651
- DOI: 10.1152/jn.01025.2009
The nervous system uses nonspecific motor learning in response to random perturbations of varying nature
Abstract
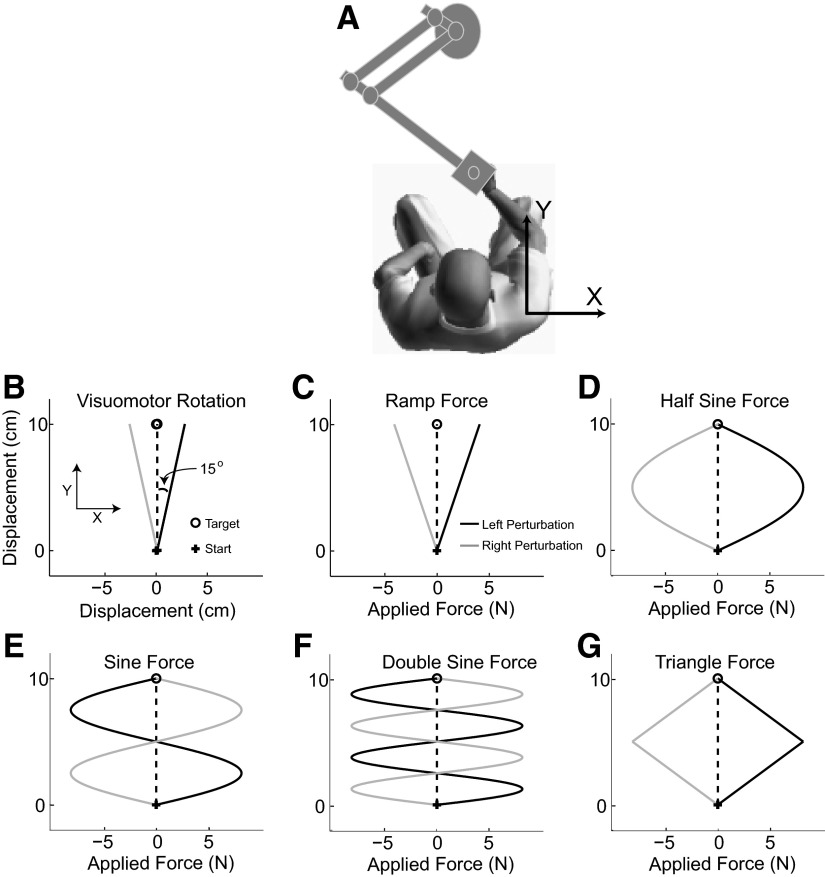
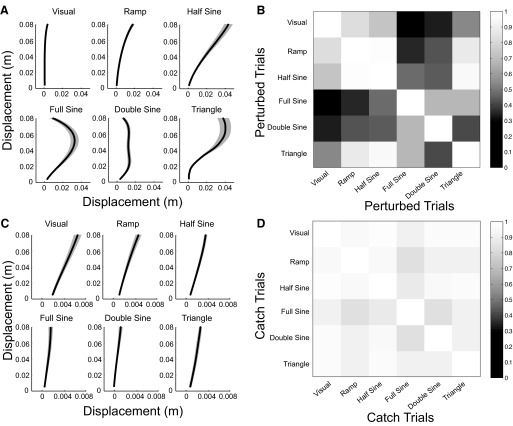
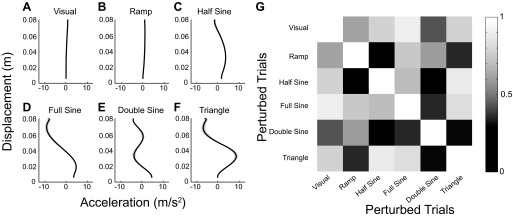
We constantly make small errors during movement and use them to adapt our future movements. Movement experiments often probe this error-driven learning by perturbing movements and analyzing the after-effects. Past studies have applied perturbations of varying nature such as visual disturbances, position- or velocity-dependent forces and modified inertia properties of the limb. However, little is known about how the specific nature of a perturbation influences subsequent movements. For a single perturbation trial, the nature of a perturbation may be highly uncertain to the nervous system, given that it receives only noisy information. One hypothesis is that the nervous system can use this rough estimate to partially correct for the perturbation on the next trial. Alternatively, the nervous system could ignore uncertain information about the nature of the perturbation and resort to a nonspecific adaptation. To study how the brain estimates and responds to incomplete sensory information, we test these two hypotheses using a trial-by-trial adaptation experiment. On each trial, the nature of the perturbation was chosen from six distinct types, including a visuomotor rotation and different force fields. We observed that corrective forces aiming to oppose the perturbation in the following trial were independent of the nature of the perturbation. Our results suggest that the nervous system uses a nonspecific strategy when it has high uncertainty about the nature of perturbations during trial-by-trial learning.
Figures




Similar articles
-
Effect of visuomotor-map uncertainty on visuomotor adaptation.J Neurophysiol. 2012 Mar;107(6):1576-85. doi: 10.1152/jn.00204.2011. Epub 2011 Dec 21. J Neurophysiol. 2012. PMID: 22190631
-
Robust Control in Human Reaching Movements: A Model-Free Strategy to Compensate for Unpredictable Disturbances.J Neurosci. 2019 Oct 9;39(41):8135-8148. doi: 10.1523/JNEUROSCI.0770-19.2019. Epub 2019 Sep 5. J Neurosci. 2019. PMID: 31488611 Free PMC article.
-
Minimizing Precision-Weighted Sensory Prediction Errors via Memory Formation and Switching in Motor Adaptation.J Neurosci. 2019 Nov 13;39(46):9237-9250. doi: 10.1523/JNEUROSCI.3250-18.2019. Epub 2019 Oct 3. J Neurosci. 2019. PMID: 31582527 Free PMC article.
-
A perspective on multisensory integration and rapid perturbation responses.Vision Res. 2015 May;110(Pt B):215-22. doi: 10.1016/j.visres.2014.06.011. Epub 2014 Jul 9. Vision Res. 2015. PMID: 25014401 Review.
-
Human sensorimotor learning: adaptation, skill, and beyond.Curr Opin Neurobiol. 2011 Aug;21(4):636-44. doi: 10.1016/j.conb.2011.06.012. Epub 2011 Jul 20. Curr Opin Neurobiol. 2011. PMID: 21764294 Review.
Cited by
-
Hand Motion Catalog of Human Center-Out Transport Trajectories Measured Redundantly in 3D Task-Space.Sci Data. 2025 Jul 24;12(1):1293. doi: 10.1038/s41597-025-05576-7. Sci Data. 2025. PMID: 40707484 Free PMC article.
-
Structural learning in feedforward and feedback control.J Neurophysiol. 2012 Nov;108(9):2373-82. doi: 10.1152/jn.00315.2012. Epub 2012 Aug 15. J Neurophysiol. 2012. PMID: 22896725 Free PMC article.
-
Treadmill-gait slip training in community-dwelling older adults: mechanisms of immediate adaptation for a progressive ascending-mixed-intensity protocol.Exp Brain Res. 2019 Sep;237(9):2305-2317. doi: 10.1007/s00221-019-05582-3. Epub 2019 Jul 8. Exp Brain Res. 2019. PMID: 31286173 Free PMC article.
-
Sensorimotor adaptation impedes perturbation detection in grasping.Psychon Bull Rev. 2025 Feb;32(1):373-386. doi: 10.3758/s13423-024-02543-y. Epub 2024 Jul 24. Psychon Bull Rev. 2025. PMID: 39048890 Free PMC article.
-
Task Instructions and the Need for Feedback Correction Influence the Contribution of Visual Errors to Reach Adaptation.eNeuro. 2023 Sep 5;10(9):ENEURO.0068-23.2023. doi: 10.1523/ENEURO.0068-23.2023. Print 2023 Sep. eNeuro. 2023. PMID: 37596049 Free PMC article.
References
-
- Dionne JK, Henriques DY. Interpreting ambiguous visual information in motor learning. J Vis 8: 1–10, 2008 - PubMed
Publication types
MeSH terms
Grants and funding
LinkOut - more resources
Full Text Sources
Miscellaneous